8.1. 협조제어 상태 모니터
8.1. 협조제어 상태 모니터
(1) 『[F1]: 서비스』 → 『1: 모니터링』 → 『10: 협조제어 데이터』를 선택합니다.

(2) 『1: 협조제어 상태』를 선택합니다.

(3) 협조제어 상태가 다음과 같이 표시됩니다.
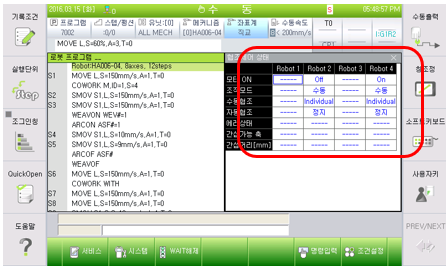
(4) 모니터링 기능의 각 항목은 다음의 의미를 가집니다.
n 모터 ON: 각 로봇의 운전 준비 상태를 표시합니다. (ON/OFF)
n 조작모드: 각 로봇이 수동모드로 설정되어 있는지 자동모드로 설정되어 있는지를 표시합니다. (수동/자동)
n 수동협조: 각 로봇의 수동모드의 협조 상태를 표시합니다.
Individual: 개별 조그 상태
Master: 협조 조그 상태, MASTER 지정
Slave: 협조 조그 상태, SLAVE 지정
n 자동협조: 로봇 재생시의 협조 상태를 표시합니다.
정지: 로봇이 기동중이 아님
독립: 개별적인 로봇 재생 동작을 수행중
대기: COWORK 명령에서 상대의 로봇이 협조 위치가 되기를 대기하는 중
협조: 협조 재생 중
n 에러상태: 각 로봇의 최근 에러 상태를 표시. 기동시에 클리어 됨
n 간섭가능 축: 상대로봇과 가장 가까운 거리를 갖는 자신 로봇의 축 이름
n 간섭거리[mm]: 간섭가능 축간의 거리

l 협조제어 파라미터에서 협조제어가 <무효>로 설정되어 있으면 모니터링 정보가 표시되지 않습니다.
