9.1. 주행축
9.1. 주행축
로봇 주행축을 구성하고 시뮬레이션을 수행할 수 있습니다.
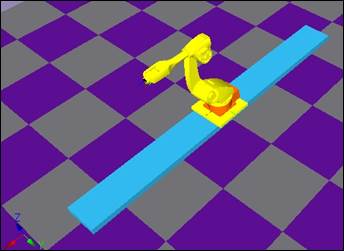
먼저, 다음 그림과 같이 레일과 슬라이더, 로봇을 구성하십시오. 레일은 기본 모델이지만, 슬라이더는 로봇제어기에 의해 움직이는 부분이므로 링크로 만들어야 합니다.

각 레일, 슬라이더, 로봇의 모델 속성은 각각 아래 표와 같이 설정하고, 로봇에 툴을 장착하십시오.
이 름 | 위 치 | 형상 파라미터 | ||||
X | Y | Z | X | Y | Z | |
레 일 | 0 | 0 | 0 | 5000 | 500 | 100 |
베이스좌표계 | 0 | 0 | 150 | 해당없음 | ||
슬라이더 | 0 | 0 | 100 | 600 | 600 | 50 |
로 봇 | 0 | 0 | 50 | 해당없음 | ||
베이스 좌표 계와 로봇 좌표 계는 원점의 X값만 다르고(주행 축 동작 시) 나머지는 같으므로, 다음과 같이 베이스좌표 계의 원점을 로봇의 원점(주행축값이 0일 때의)과 일치시킨 것입니다.
레일 원점을 기준으로 한 로봇 원점의 좌표 값이 (0, 0, 150)이므로 베이스좌표 계의 모델속성 위치도 (0, 0, 150)이어야 합니다. (레일높이 100mm) + (슬라이더높이 50mm) = 150mm)

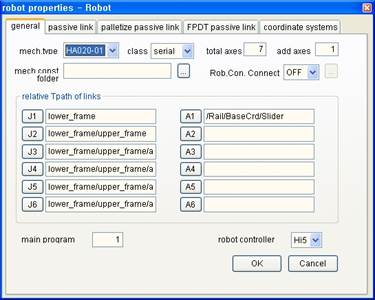
로봇의 부가축1번을 주행축으로 지정합니다. 로봇 속성 대화상자를 여십시오.
n 총축수를 7개로, 부가축수를 1개로 설정하십시오.
n A1(부가축1번) 버튼을 클릭하고, 트리창에서 슬라이더를 클릭하십시오.
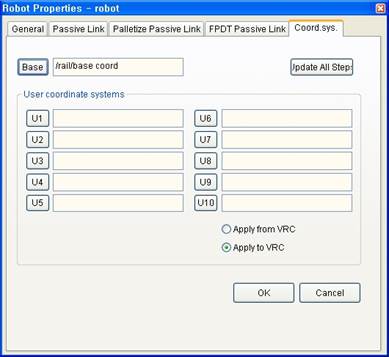
n 베이스 버튼을 클릭하고, 트리창에서 베이스좌표계를 클릭하십시오.
이제, 확인 버튼으로 로봇 속성 대화상자를 닫습니다.
축 수가 바뀌었으므로 가상제어기를 시스템 초기화해야 한다는 메시지가 나옵니다. ‘확인’ 버튼을 누릅니다.

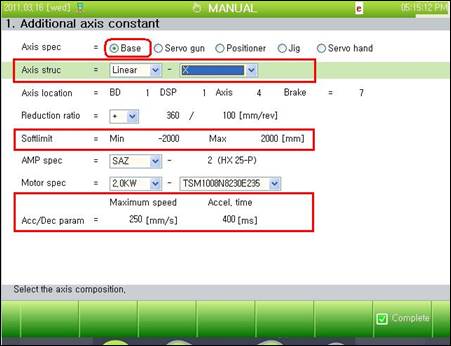
아래와 같은 메시지가 나오고, 가상 티치펜던트가 자동으로 열립니다. 메시지에 나온 설정화면으로 들어가 7축에 대한 부가축 정수를 설정하십시오. 그림과 같이 축 사양은 베이스로 하고, 축 구성의 X방향으로 하며, 소프트리미트, 가감속 파라미터 등을 적절히 조정한 후 [F7: 완료] 키를 누르십시오.

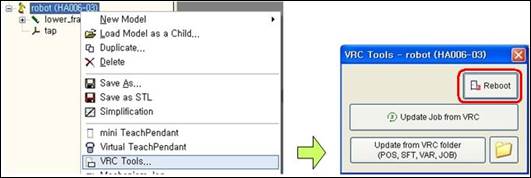
설정을 반영하기 위해 문서를 저장한 후, VRC 재부팅을 수행하십시오.

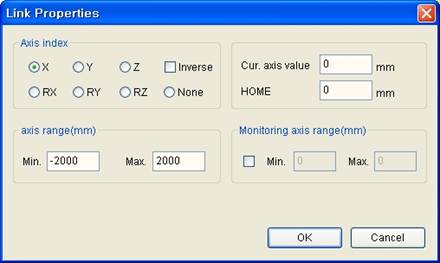
이번엔 슬라이더의 링크 속성 대화상자를 여십시오. 로봇이 좌우로 X축을 따라 움직여야 하므로, 축 인덱스를 X축으로 하고, 축 범위를 설정하십시오.
이제 작업을 생성해봅시다. 먼저, 미니 T/P로 작업을 생성합니다.
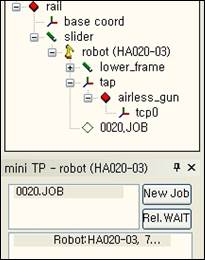
교시막대의 좌표계 설정은 베이스로 하십시오. robot좌표계인 스텝은 로봇의 주행축 이동을 따라 같이 움직이게 됩니다.

다음과 같이 주행축을 움직이면서 기록버튼 등을 사용해 교시합니다.
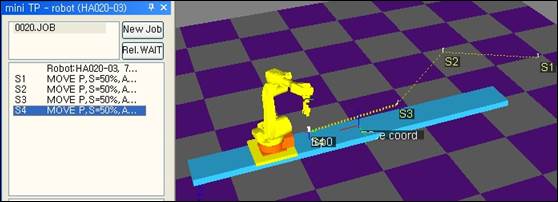
교시를 끝냈으면, 시뮬레이션을 수행하여 동작을 확인하십시오.