9.2. 사용자좌표계
9.2. 사용자좌표계
HRSpace3는 최대 10개의 사용자좌표계를 지원합니다. 이 기능을 사용하면, 로봇이 아닌 대상물의 자식모델로서 작업을 만들수 있기 때문에, 대상물을 다른 위치/방향으로 옮길 때 작업도 같이 옮겨지는 장점이 있습니다.
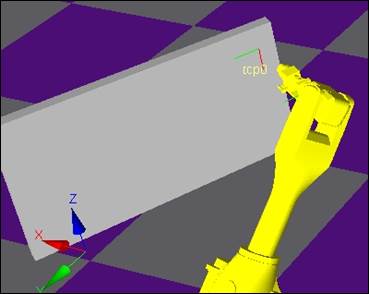
예를 들어 아래와 같이 직사각형 판넬의 4개의 모서리면에 사용자좌표계 스텝을 교시한다고 가정합니다.
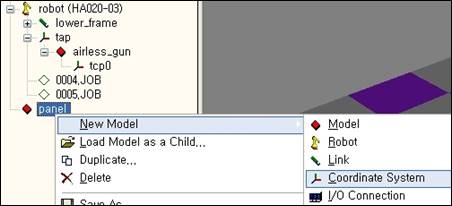
먼저 사용자좌표계를 판넬의 자식모델로서 생성하고, 이름을 ‘crd_panel’ 로 설정합니다.
좌표계는 다음과 같이 판넬의 원점위치에 생성되었습니다. 필요하다면 좌표계의 모델속성을 수정하여 좌표계 원점 위치/방향을 조정하십시오.

로봇의 미니T/P를 열어 새로운 작업을 생성합니다. 트리창은 다음과 같은 형태가 됩니다.

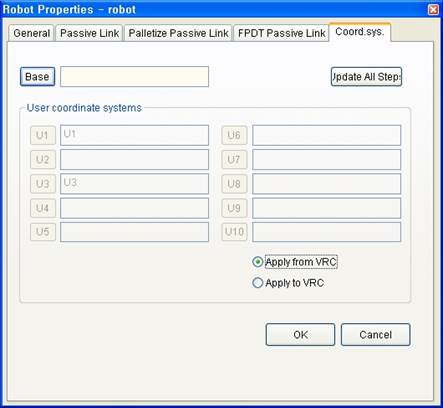
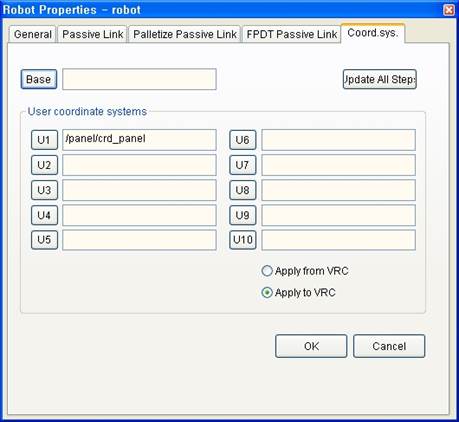
이제, 로봇의 속성을 열고 좌표계 탭을 선택합니다. 사용자좌표계의 U1 버튼을 클릭한 후 트리창의 crd_panel을 클릭합니다.
가상제어기와의 연동 방식을 아래 옵션 중 하나로 선택하십시오.
VRC로부터 반영받기 | 가상제어기에서의 사용자좌표계의 변화가 가상제어기에 즉각 반영됩니다. 현장의 로봇제어기 파일을 불러들여 3D 화면에서 관찰하거나, 가상 티치펜던트를 조작 연습용으로 활용할 때 유용한 설정입니다. |
VRC로 반영하기 | HRSpace3에서의 사용자좌표계의 변화가 가상제어기에 즉각 반영됩니다. 3D화면에서 작업 셀을 설계하여, 로봇제어기 파일들을 생성해낼 때 유용한 설정입니다. |
이제 확인버튼으로 대화상자를 빠져나옵니다.
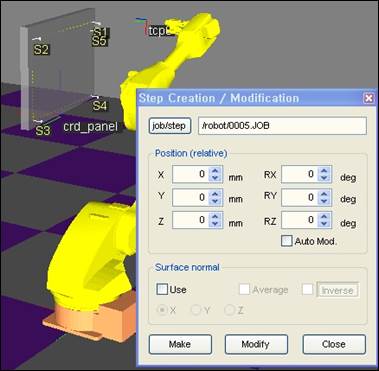
이제 스텝 생성/수정 대화상자를 이용하여 판넬 표면에 스텝들을 교시합니다. 이 때, 교시막대의 좌표계 드롭다운 리스트박스는 반드시 user1으로 설정해놓아야 합니다.

스텝 생성/수정 대화상자에 나타나는 좌표들이 로봇좌표계가 아닌 사용자좌표계임을 볼 수 있습니다.
교시가 끝났으면 시뮬레이션을 실행해보십시오. 결과가 정상적이라면, 판넬의 위치/방향을 변경한 후 로봇 속성의 좌표계 페이지에서‘VRC로 반영’ 버튼을 누르고 다시 시뮬레이션 해보십시오. 변경 전과 동일한 판넬 표면 위치들로 툴 끝이 이동함을 알 수 있습니다.

가상제어기는 제어 파라미터 설정으로서 최대 10개의 사용자좌표계를 가지고 있을 수 있습니다. 이 정보를 HRSpace3에서 활용해야 한다면 ‘VRC로부터 반영’ 라디오버튼을 선택하십시오. 로봇모델의 자식모델로서 좌표계모델들을 생성하고, 로봇모델의 좌표계 속성을 자동으로 설정해줍니다.
이후 가상제어기에서 동적으로 사용자좌표계값이 변경되면, HRSpace3에도 반영됩니다.