1.1.멀티태스킹 기능에 대하여
1.1.멀티태스킹 기능에 대하여
Hi5a 제어기는 총 8개의 프로그램(JOB 파일)을 동시에 독립적으로 실행할 수 있으며, 이러한 독립된 동작방식에 의해 수행되는 멀티태스킹 제어를 “멀티태스킹 기능”이라 합니다.
멀티태스크 기능을 이용하면 로봇 제어 프로그램을 실행하면서 동시에 다른 디바이스를 제어하는 프로그램을 실행할 수 있습니다. 이때 로봇 제어와 다른 디바이스 제어를 서로 독립적으로 수행할 수 있고 필요한 경우에는 로봇과 다른 디바이스가 서로 동기된 상태로 협업작업을 할 수도 있어 복잡하고 어려운 응용작업을 수행할 수 있는 이점이 있습니다.
아래의 그림은 기존의 싱글태스킹 구조입니다(구 Hi5제어기 버전 30.00-00계열). 여기서는 1개의 태스크만 존재하여 2개 이상의 프로그램을 동시에 독립적으로 실행 할 수 없었습니다. 이어서 설명할 멀티태스킹 구조와 비교해 보면 메인태스크만 존재하고 서브태스크는 없다고 생각하면 됩니다. 아래 그림 1.1을 참조하시기 바랍니다.

그림 1.1 싱글태스킹 구조
아래의 그림 1.2는 Hi5a 에서지원하는 멀티태스킹 구조입니다. 최대 8개의 태스크가 동시 실행 가능하기 때문에 각 태스크 당 1개의 프로그램 (JOB 파일)을 할당하여 최대 8개의 프로그램(JOB 파일)을 독립적으로 동시에 실행할 수 있습니다. 8개의 태스크를 동시에 수행함으로써 다수의 디바이스 제어를 독립적으로 수행할 수 있습니다. 그러나 로봇 제어는 메인태스크에서 1대의 로봇만 가능합니다. 동시에 여러 대의 로봇을 이용해서 동기된 작업을 하시려면 당사의 협조제어를 이용하시기 바랍니다.
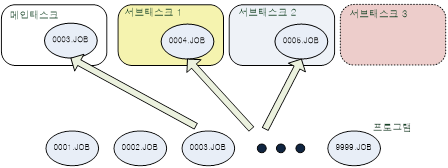
그림1.2 싱글태스킹 구조
프로그램을 실행하는 8개의 태스크들의 명칭은 아래와 같습니다.
l 메인태스크
l 서브태스크 1
l 서브태스크 2
l 서브태스크 3
l 서브태스크 4
l 서브태스크 5
l 서브태스크 6
l 서브태스크 7
메인태스크는 JOB 프로그램을 수행하기 위해서 항상 기본으로 생성되고 존재하며, 서브태스크 1, 서브태스크 2, …, 서브태스크 7 (하기 “서브태스크1/2/3/4/5/6/7”으로 명기)은 필요에 따라 생성과 소멸이 가능합니다. 서브태스크의 생성은 메인태스크 프로그램에서 TaskStart 명령문을 실행할 때 자동으로 이루어지거나 또는, 메인태스크에서 생성된 서브태스크 프로그램에서 TaskStart 명령문을 실행할 때 이루어집니다. 즉, 동작 중인 서브태스크에서도 서브태스크를 생성 명령을 내릴 수 있습니다. 서브 태스크 생성 구조는 그림 1.3을 참조하시기 바랍니다. 서브태스크의 소멸은 각각의 서브태스크 프로그램에서 END 명령문이 실행될 때 자동으로 이루어집니다.
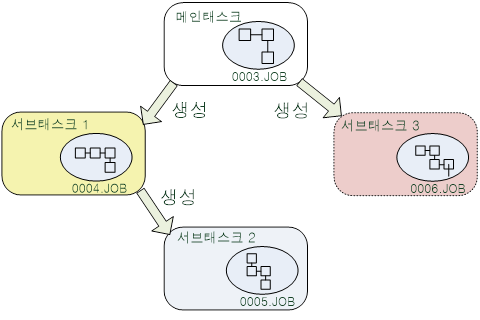
그림 1.3 싱글태스킹 구조 서브태스크 생성