4.3.1. 수동 교정 (Manual Calibration)
4.3.1. 수동 교정 (Manual Calibration)
수동 교정 방법은 Pick-it 제어 화면을 통해 교정판(Calibration Plate)이 보이는지 확인하면서 로봇의 위치와 포즈를 TP 로 조작한 다음에 PICKIT.FCP 명령을 보내는 방법입니다. 그림 4-6는 수동 교정하는 방법을 플로우 차트로 나타낸 것입니다.
수동 교정을 간단히 설명하면 TP로 로봇을 움직인 후에, 교정판(Calibration Plate)이 Pick-it 설정 화면에 보이는지 확인한 후, TP에서 수동으로 JOB 파일에 PICKIT.FCP 명령문을 선택해서 보내는 것입니다. Pick-it 설정 화면에서 교정판(Calibration Plate)을 보면서 작업을 수행하기 때문에 처리 결과에 따라 유연하게 대응하면서 교정이 가능합니다.
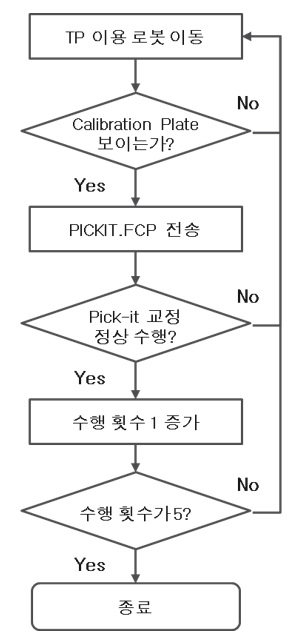
그림 4-6 수동교정 풀로우 차트
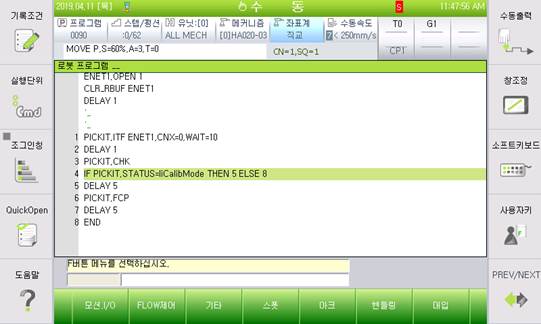
그림 4-7 수동 교정 JOB 파일
수동 교정하는 방법을 JOB 파일과 함께 설명을 하도록 하겠습니다. 이 방법은 반드시 로봇 제어기 동작을 수동(Manual)으로 하고 수행해야 합니다. 실행단위는 Cmd로 설정하고 “STEP FWD”와 “STEP BWD” 키로 조작을 하시기 바랍니다.
(1) Pick-it 설정화면에서 Run mode를 중단시키고 Calibration 화면으로 이동합니다.
(2) JOB 파일에서 설정에 필요한 유용한 변수들까지 Cmd 단위로 수행합니다. (자세한 변수 정의는 부록의 JOB 파일을 참고하시기 바랍니다.)
(3) 이더넷 설정 명령문까지 Cmd 단위로 수행합니다.
(4) 그림 4-7의 1행 명령문과 같이 PICKIT.ITF 인터페이스 설정까지 Cmd 단위로 수행을 합니다. 이때CNX=0 으로 두어 주기적으로 로봇을 포즈를 Pick-it 으로 보내는 기능을 비활성화합니다.
(5) 2행에서 4행까지 수행을 하고 5행에 이르게 되면 JOB 파일 수행을 멈추고 TP 조그로 로봇을 움직여 위치와 자세를 변경합니다. 이때 Pick-it 설정 화면을 보면서 교정판(Calibration Plate)이 화면 안에 들어 온 상태에서 네 모서리의 표식 중 3개 이상이 보이는지 확인합니다.
(6) PICKIT.FCP 명령문으로 이동해서 Cmd 단위로 수행합니다. JOB 파일에 DELAY 명령문은 다음 명령문으로 이동하기 전에 Cmd 수행을 멈추기 위한 시간을 가지기 위해서 있습니다.
(7) 전체 교정 과정이 완료될 때까지(5)와 (6)을PICKIT.FCP 명령문으로 이동해서 Cmd 단위로 총 5회 수행합니다.