4.3.2. 자동 교정 (Automatic Calibration)
4.3.2. 자동 교정 (Automatic Calibration)
자동 교정은 사전에 저장한 5개의 다른 로봇 포즈와 PICKIT.FCP 를 JOB 파일에서 처리해서 JOB 파일 수행으로 처리하는 방식입니다. 수동교정 방식에 비해서 JOB 파일이 복잡해지고 사전에 로봇 포즈를 변수에 미리 저장해야 한다는 불편함이 있는 대신에 동일한 JOB 을 다음에 교정을 수행할 때 재활용하거나 동일한 환경의 여러 대의 로봇에 적용할 수 있다는 이점이 있습니다. 자동교정을 수행할 때 JOB 파일 수행은 자동, 1사이클 수행으로 설정하시기 바랍니다.
자동교정 방법의 동작 플로우 차트는 그림 4-8과 같습니다.
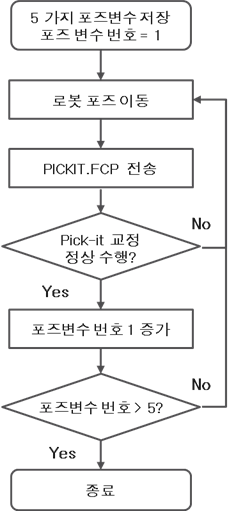
그림 4-8 자동교정 플로우 차트
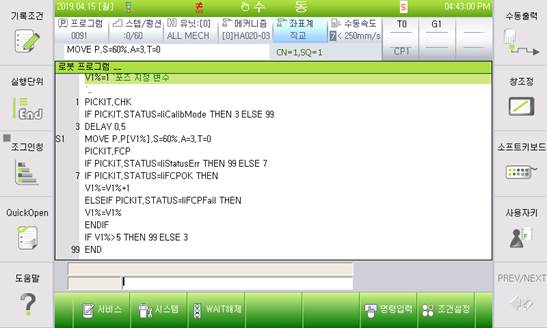
그림 4-9 자동 교정 JOB 파일
(1) Pick-it 설정 화면을 보면서 TP로 로봇을 5가지의 다른 포즈를 취하도록 한 뒤에 5개의 포즈 변수에 저장해 둡니다.
(2) Pick-it 설정화면에서 Run mode를 중단하고 Calibration 화면으로 이동합니다.
(3) 자동 교정을 위한 JOB 파일을 수행합니다.
(4) 포즈번호를 지정할 변수 값을 1로 설정합니다. (첫 번째 포즈변수를 지정하기 위함)
(5) JOB 파일의 1행에서는 현재 Pick-it의 모드를 확합니다.
(6) 만약 Pick-it 모드가 교정 모드가 아니면 JOB 파일 수행을 종료합니다.
(7) 로봇은 미리 입력된 포즈변수 중 포즈번호 지정변수에 해당하는 포즈변수의 위치와 자세로 이동을 합니다.
(8) 로봇이 포즈 변수의 위치로 이동한 뒤에 PICKIT.FCP 명령문을 수행합니다.
(9) Pick-it은 PICKIT.FCP 명령을 받고 이를 처리한 결과를 로봇으로 보냅니다.
(10) 만약 Pick-it 의 반응이 없으면 PICKIT.STATUS 에는 에러 값(-1)이 들어갑니다. 이때 로봇은JOB 파일 수행을 종료합니다.
(11) Pick-it이 정상적으로 교정을 성공하면 포즈번호 지정변수를 1 증가시키고 실패하면 포즈번호 지정변수를 증가시키지 않고 그대로 둡니다.
(12) 포즈번호 지정변수가 5이하이면 (7)로 이동해서 계속 교정 작업을 수행하고 5 초과이면 교정이 완료된 것이므로 교정 작업을 완료합니다.