5.4. 작업물 좌표
5.4. 작업물 좌표
Pick-it에서 로봇으로 전달하는 작업물의 포즈 값은 그림 5-1과 같이 양의 Z축 방향이 지면을 수직으로 뚫고 나오는 방향이거나 작업물의 표면에 수직이면서 지면을 뚫고 나오는 방향으로 설정됩니다. 이 자세 값을 그대로 이용할 경우에는 로봇의 툴 좌표계와 방향이 맞지 않아서 문제가 발생할 수 있습니다. 로봇 툴은 그림 5-2와 같이 대체적으로 플랜지에서 로봇 팔 밖을 향하는 방향으로 양의 Z축 방향으로 정합니다. Pick-it에서 보내주는 작업물의 자세를 그대로 이용하면 툴이 로봇 안쪽을 향하는 형태가 되기 때문에 에러가 발생합니다.
현대로봇은 이러한 문제를 해결하기 위해서 그림 5-3과 같이 Pick-it에서 보내주는 작업물의 자세를 내부적으로 임의로 X축을 기준으로 180° 회전해서 작업물의 자세를 변형한 뒤에 포즈 변수에 저장합니다. 이렇게 하면 툴이 작업물 파지 하기 위한 자세를 취할 수 있습니다. Pick-it 화면에서 보이는 작업물 자세와 로봇에서 포즈변수로 이용하는 작업물 자세의 차이점에 주의하시기 바랍니다.
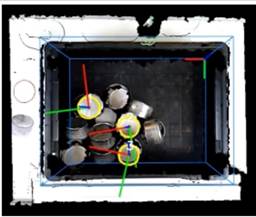
그림 5-1 Pick-it작업물 Z축 방향
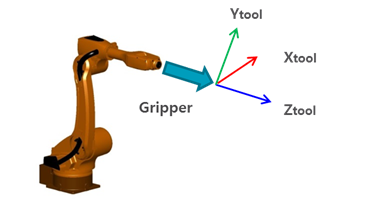
그림 5-2 툴 좌표계 Z축 방향
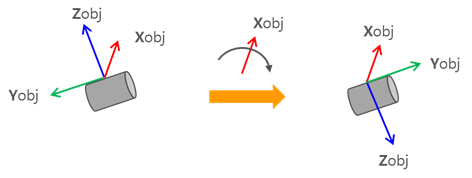
그림 5-3 작업물 자세 변환 저장