1. 개요
로봇 기구의 부품 고장(특히, 모터나 감속기)이 발생하여 해당 부품을 교체하는 경우 기존 티칭 프로그램을 재가동하기 위해서는 기존의 원점과 동일한 조건으로 엔코더를 보정하여야 합니다.
하지만 AS요원이 현장에서 상기의 조치를 수동으로 할 때는 다수의 시행착오를 통해 원점을 맞추는 경우가 발생하기도 합니다.
따라서, Hi5a 제어기는 이를 쉽게 조치하기 위한 전용 기능을 제공합니다.
※ 기구 수리 후 원위치 복원이란?
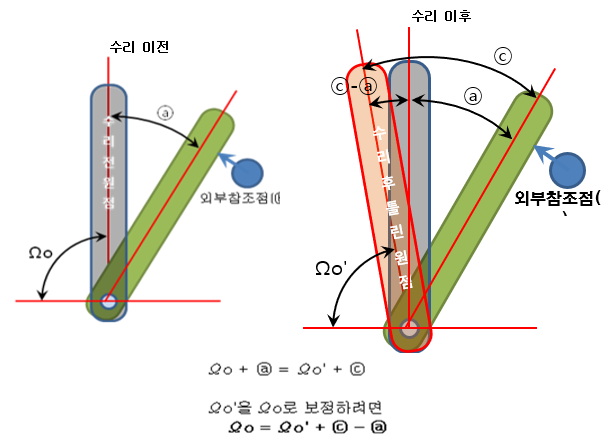
즉, 원위치 복원이란
외부참조점(다이얼게이지)을 이용하여 부품 교체 후, 부정확하게 보정된 원점 Ωo'을 ⓒ-ⓐ값으로 보상하여 정확한 원점인 Ωo로 복원하는 것.(티칭프로그램 재사용을 위해 필요)
 주의사항
주의사항
*외부참조점(ⓑ)의 위치가 부품 교체 전과 교체 후에 변경되면 안됩니다. 즉, 부품 교체 전과 교체 후 반드시 동일 위치여야 합니다.*