2. 기능
하기에서는 S축의 모터를 교체한다는 가정하에 기능을 설명합니다.
(1) 신규 프로그램(101.JOB)을 지정하고 단단히 고정된 툴의 한 지점과JIG 혹은 주변장치에 근접하도록 S1[확인지점Approach], S2[원위치 확인지점, S1대비 S축만 회전]을 티칭합니다.

(2) S축의 모터를 교체한 후, 교체전의 엔코더 보정 위치와 근접하게 S축을 수동 조작한 후 시스템/로봇 파라미터/엔코더 보정 화면에서 S축에 대해 엔코더 보정을 수행합니다.
(3) 티칭된 프로그램(101.JOB)을 수동 조작하여 S1으로 이동하고, 그 후 S2로 이동하면서 기구 부품 교체전과 동일한 위치가 되었을 때 S3[원위치 확인지점, S1대비 S축만 회전]을 티칭합니다.
S3[원위치 확인지점, S1대비 S축만 회전]

(4) S축에 대한 엔코더 보정값을 자동 계산합니다.
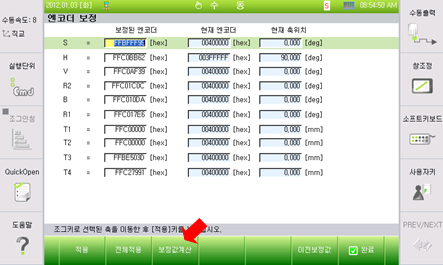
1. 시스템/로봇 파라미터/엔코더 보정 화면에 진입합니다.
2. S축으로 커서를 이동한 후, [F3: 보정값계산]을 누릅니다.
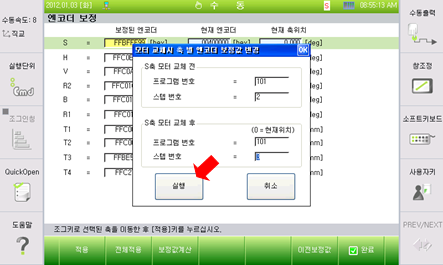
3. “S축 모터 교체 전”의 프로그램 번호는 101, 스텝 번호는 2로 설정하며“S축 모터 교체 후”의 프로그램 번호는 101, 스텝 번호는 3으로 설정한 후, [실행] 버튼을 누릅니다.
(※ “S축 모터 교체 후”의 프로그램 또는 스텝 번호가 0이면 현재 로봇의 S축 위치로 엔코더 보정값을 계산합니다.)
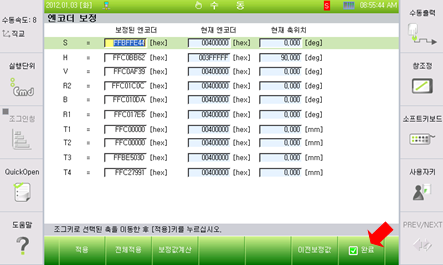
4. S축에 계산된 엔코더 보정값이 화면에 표시되며, [F7: 완료]를 누르면 보정된 엔코더값이 반영됩니다.
5. 티칭된 프로그램(101.JOB)의 S2로 이동하였을 때, 모터 교체전과 동일한 위치인지 확인합니다.