4.1. 6축 힘/토크 센서(ATI社)
4.1. 6축 힘/토크 센서(ATI社)
본 자료는 ATI 제조사에서 제작한 이더넷통신 기반의 6축 힘/토크 센서에 해당하는 내용입니다. 기능설명서와 함께 참고하십시오.
① 센서 구성: 6축 힘/토크 센서, Net Box, 센서케이블, 전원, 랜케이블
② 센서별 측정 범위
표4‑1 6축 힘/토크센서의 측정범위
Sensor | Delta | Theta | Omega |
Axes | SI660-60 | SI2500-400 | SI7200-1400 |
Fx, Fy(±N) | 660 | 2500 | 7200 |
Fz(±N) | 1980 | 6250 | 18000 |
Tx, Ty(±Nm) | 60 | 400 | 1400 |
Tz(±Nm) | 60 | 400 | 1400 |
③ 센서 부착: 그림 1과 같이 센서에 표기된 센서의 좌표계가 그림 2의 로봇말단에 표시된 센서좌표계(Xs,Ys,Zs)와 일치하도록 센서를 부착합니다.
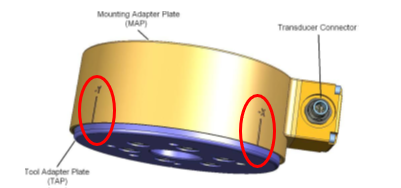
그림4.1 센서의 좌표계

그림4.2 센서좌표계(Xs,Ys,Zs)와 로봇좌표계(Xr,Yr,Zr)
④ 케이블 연결: 힘센서와 Net Box는 센서케이블로, Net Box와 로봇제어기는 랜선으로 연결해주어야 합니다.
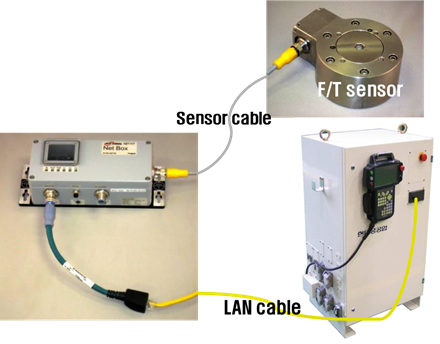
그림4.3 센서-Net box-로봇제어기의 케이블 연결
⑤ 전원 연결: Net Box에 전원 선을 연결하여 전원(24V)을 공급해줍니다. Net Box의 점등상태로 연결을 확인합니다. 각 케이블과 전원의 연결이 정상인 경우 그림 4의 점등 상태를 보입니다. 점등상태가 그림과 일치하지 않은 경우, 케이블 연결 및 전원 연결을 다시 확인하십시오.

그림4.4 Net Box 전원 연결, 점등상태 확인