4.2. 단축로드셀(Burster社) & 시리얼통신 모듈(Beckhoff社)
4.2. 단축로드셀(Burster社) & 시리얼통신 모듈(Beckhoff社)
본 자료는 Beckhoff사의 시리얼통신모듈(RS232)과 함께 Burster사의 단축로드셀을 사용하는 경우에 해당하는 설명자료입니다. 기능설명서와 함께 참고하십시오.
① 센서 구성: 단축로드셀(앰프연결 모델), 시리얼통신모듈(RS232), 시리얼 케이블(RS232)
② 센서별 측정범위: 앰프연결 모델의 모델명 및 측정범위는 표 1과 같습니다. Fd 설정시 이를 참조하여 범위 내의 값으로 설정하십시오.
표4‑2 로드셀의 측정범위
Sensor | Measurement range |
8532-5500 | 0 ~ 500 N |
8532-6001 | 0 ~ 1 KN |
8532-6002 | 0 ~ 2 KN |
8532-6005 | 0 ~ 5 KN |
8532-6010 | 0 ~ 10 KN |
8532-6020 | 0 ~ 20 KN |
③ 센서 부착: 단축로드셀은 사용하려는 툴 좌표계의 +Z방향과 그림 1에 표시된 단축로드셀의 +Z방향이 일치하도록 설치해야 합니다.

그림4.5 센서의 좌표계
④ 시리얼통신모듈 연결: 시리얼통신 모듈은 RS232커플러(BK8100), 버스터미널(KL3100), 버스엔드터미널(KL9010)로 구성됩니다. 세 부품은 RS232커플러-버스터미널-버스엔드터미널 순서로 조립하고, 통신모듈에 부착된 주소설정단자는 X1은 1, X10은 0으로 설정합니다.
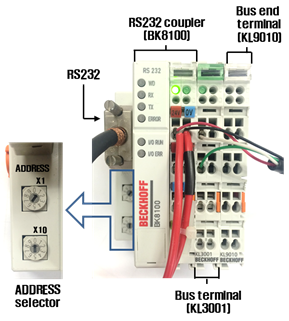
그림4.6 시리얼통신모듈
⑤ 로드셀 선 연결: 로드셀의 신호선과 전원선을 그림 2와 표 2을 참고하여 통신모듈에 연결합니다.
표 4‑3 로드셀과 통신모듈의 배선
| 로드셀 | 시리얼통신모듈 |
신호선(+) | 흰색 선 | 버스터미널의 1번 단자 |
신호선(-) | 녹색 선 | 버스터미널의 2번 단자 |
전원(+) | 붉은 선 | RS232커플러의 24V 단자 |
전원(-) | 검은 선 | RS232커플러의 0V 단자 |
⑥ 전원 연결: 시리얼통신모듈의 전원을 로봇제어기의 전원에 연결하여 시리얼통신모듈과 로드셀에 전원을 공급합니다. 로드셀과 시리얼통신모듈 모두 24V 전압을 사용하므로, 로드셀이 연결된 시리얼통신모듈의 24V와 0V단자를 제어기의 24V와 0V 단자에 각각 연결하여 사용합니다.
⑦ 시리얼 케이블 연결: 시리얼통신모듈의 시리얼포트와 로봇제어기의 시리얼포트#2를 시리얼 케이블로 연결합니다. 시리얼 케이블은 15m 이내의 크로스 케이블을 사용해야 합니다.
⑧ 점등상태 확인: 신호선, 전원선, 시리얼케이블연결이 완료되면 로봇제어기의 전원을 인가하여 그림 2와 같이 시리얼통신모듈의 녹색 LED가 점등되는지 확인합니다. 힘제어 수행중 붉은색LED가 점등될 시 각 모듈의 연결상태 및 통신설정을 확인하십시오.
⑨ 통신설정: 기능설명서 2.2.B절과 표 3를 참고하여 시리얼포트#2의 통신환경을 설정합니다.
표 4‑4 시리얼 통신 환경설정
Baudrate | 38400 |
문자 길이 | 8 |
스톱 Bit | 1 |
페리티 Bit | 짝수 |
에코 | 무효 |
포트용도 | Sensor |
통신방식 | RS232 |
⑩ 명령어 설정: 단축로드셀은 툴 좌표계 -Z방향으로의 힘(센서를 누르는 힘)만 측정하므로, 힘제어에 사용하는 명령어는 툴좌표계 Z방향을 기준으로 설정해야 합니다. 기능설명서 2.5절과 표 4 참조하여 각 명령어에 적절한 파라미터를 설정하십시오.
표4‑5 명령어 파라미터
ForceCtrl | CRD | 기준 좌표계 | § 입력값과 무관 | |
T | 힘제어 툴번호 | § 입력값과 무관 | ||
BC | Bias Clear | § 툴이 외부와 접촉하지 않은 상태에서 | ||
FCset | Fd | § +Z방향의 가압력을 설정 | ||
Dmp | Dt | Z방향의 값을 설정 | ||
Dr | 입력값과 무관 | |||
LIMIT | POS | § 힘제어 시 로봇이 동작할 수 있는 영역을 § 기준좌표계: 로봇좌표계 | ||
VEL | § 힘제어 시 로봇이 동작할 수 있는 § 기준좌표계: 툴 좌표계 | |||