1.2. 실러 도포기능의 작동 원리
1.2. 실러 도포기능의 작동 원리
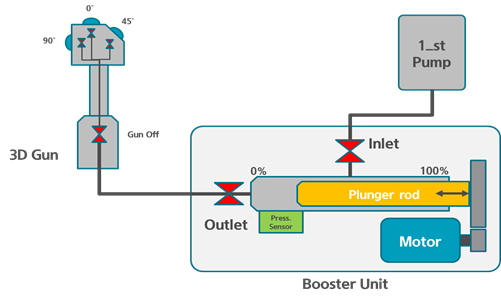
그림 1.3 3D건 적용 실링 시스템 구성
실링 시스템의 구성은 현장상황이나 장비에 따라 조금씩 다를 수 있습니다. 예를 들어 단일 건으로 구성되는 경우 건과 부스터 유닛이 일체형인 경우도 있으나, 3D 건을 적용 하는 경우 상기의 그림에서와 같이 시스템이 구성 될 수 있습니다. 그러나 기본적으로 시스템은 1차 펌프와 부스터 유닛, 그리고 건으로 구분할 수 있습니다.
본 기능에서는 부스터 유닛과 건에 대한 각종 밸브의 개폐제어 및 가압력 제어를 로봇제어기에서 수행할 수 있도록 합니다. 예를 들어 충전 시에는 입력 밸브만을 개방한 상태에서 실린더를 후퇴하여 1차 펌프에서 공급되는 실링용액을 실린더 내부에 충전합니다. 실린더가 충전 완료 위치에 도달한 후에는 실링 용액이 실린더 내부를 충분히 채워 충전완료 압력에 도달할 때까지 대기 후 입력 밸브를 닫고 출력 밸브를 개방한 후 실린더의 위치를 조정하여 대기압력에 도달하도록 압력 제어를 수행합니다.
실러 도포 시에는 건 오프 밸브와 지정된 건 밸브를 개방하고, 실린더를 밀어 실링 용액을 작업물에 도포합니다. 이때, 실린더의 전진 속도에 따른 토출 유량이 밸브 개방과 동시에 목표로 하는 유량을 만들 수 없으므로, 토출 전에 설정한 압력을 사전에 가해 줌으로써 토출 초기 도포량을 원하는 수준으로 조절 할 수 있게 됩니다. 아래는 초기 압력에 따른 초출 초기 도포형상에 대한 예 입니다. 시험 도포 후 비드의 시작점 상태에 따라 적절한 사전 가압력을 설정 하시기 바랍니다.
| 적정 압력 |
| 압력이 낮은 경우 |
| 압력이 높은 경우 |


