1.3. 예제 프로그램
1.3. 예제 프로그램
팩인홀(Peg in hole) 작업
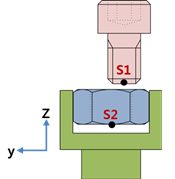
로봇의 움직임 | § 홀과 근접한 S1으로 이동 § SoftXYZ기능on 후 조립완료 점인 S2로 이동 § 조립이 완료되어 기능 off |
위치기록 | § S1: 홀과 근접한 곳에 팩을 위치시킴 § S2: 팩이 조립 완료되기 위한 툴 끝 위치. |
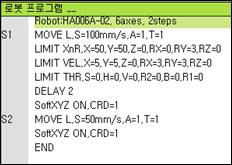
LIMIT 설정 | 기록한 위치대비 정렬이 필요한 방향과 정렬이 필요하지 않은 방향을 구분하여 값을 설정해야 함. 예제의 팩인홀 작업은 X,Y,RX,RY방향의 위치 오차가 발생하므로 해당방향의 힘제어가 필요함.
§ XnR: X,Y,RX,RY방향으로 작업에 필요한 이동거리를 설정 Z,RZ뱡항으로는 외력에 반응하지 않도록 0으로 설정 § VEL: X,Y,RX,RY방향으로 힘제어에 의한 움직임의 최대 속도를 설정 Z,RZ뱡항으로는 외력에 반응하지 않도록 0으로 설정 § THR:축별 문턱값을 설정하여 불필요한 외란에 대한 움직임을 제거 값이 클수록 민감도가 떨어지므로 가능한 작은 값을 사용 |