2.1. 손목 부착식 비전
2.1. 손목 부착식 비전
이번 절의 설명은 V2.0.12이하 버전에만 해당합니다. | ||
[Step 1] (1) 보정판을 외부에 잘 위치시킵니다. (2) 캘리브레이션 종료 시까지 보정판은 움직이면 안됩니다. (보정판과 로봇 베이스 사이의 관계(위치와 방향)는 항상 고정이어야 합니다.) | ||
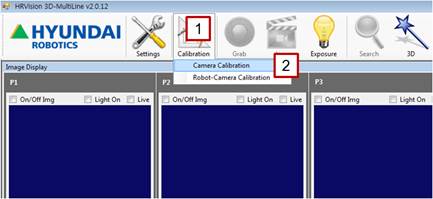
[Step 2] (1) 메인 메뉴에서 [Calibration] 버튼을 클릭합니다. (2) [Camera Calibration] 버튼을 선택합니다. | ||
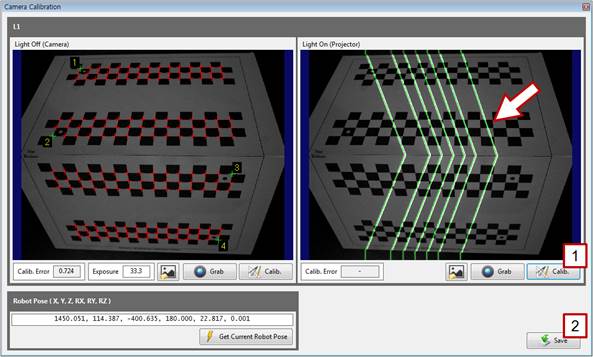
[Step 3] (1) 프로젝터의 패턴 조명을 끄고 왼쪽 [Grab] 버튼을 클릭하고 영상의 초점 및 밝기 상태를 확인합니다. (2) 프로젝터의 패턴 조명을 켜고 오른쪽 [Grab] 버튼을 클릭합니다. 영상의 초점 및 밝기 상태를 확인합니다. (3) 필요한 경우 카메라 노출 값을 [Exposure] 칸에 적어 알맞은 밝기로 조절합니다. (4) 로봇의 현재 포즈를 [Robot Pose] 칸에 적습니다. 로봇이 한 대만 사용되는 경우에는 베이스 좌표계로 기록된 로봇의 포즈를 적고, 여러 대가 공통의 좌표계를 사용하는 경우에는 사용자 좌표계로 기록된 로봇의 포즈를 적습니다. | ||
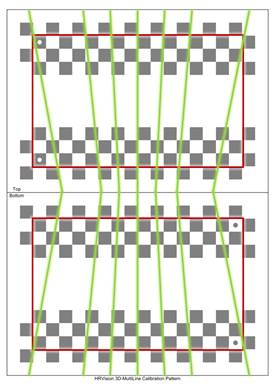
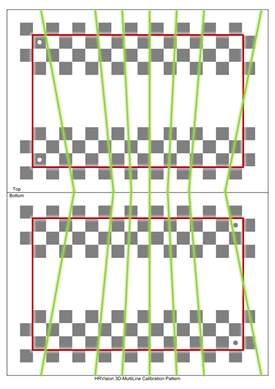
[Step 4] (1) 프로젝터에서 투사한 7개의 선이 보정판의 유효영역(빨간색으로 표시한 양쪽 사각형의 내부 영역) 내에 다 들어오는지 확인합니다. (2) 유효영역을 벗어나는 선이 있으면 보정판의 위치와 방향을 적절히 조절한 후 [Step 3]부터 다시 수행합니다.
| ||
[Step 5] (1) 왼쪽 [Calib.] 버튼을 클릭한 후 왼쪽 화면에서 보정판의 코너가 잘 검출되었는지 확인합니다. (빨간색 십자모양으로 표시됩니다.) (2) 일반적으로 [Calib. Error]의 값은 1.0를 넘지 않습니다. 1.0가 넘는 경우는 카메라의 초점 및 밝기 상태가 적절하지 않거나 보정판의 위치나 방향이 좋지 않아 보정판의 검출 정확도가 떨어지는 경우입니다.
(3) 위와 같은 경고 창이 나타나면 보정판이 기구적으로 잘못 제작되었거나 보정판 종이를 잘못 부착한 것이오니 다시 제작한 후 캘리브레이션을 수행하는 것을 권고합니다.
| ||
| ||
[Step 6] (1) 오른쪽 [Calib.] 버튼을 클릭합니다. (2) 오른쪽 화면에서 패턴 조명이 잘 검출되었는지 확인합니다. 검출이 잘 되었을 경우 [Save] 버튼을 누르고 창을 닫고, 그렇지 않을 경우 [Step 3]부터 다시 수행합니다. | ||
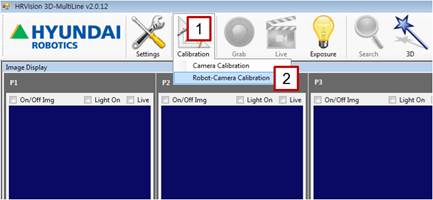
[Step 7] (1) 메인 메뉴에서 [Calibration] 버튼을 클릭합니다. (2) [Robot-Camera Calibration] 버튼을 선택합니다. | ||
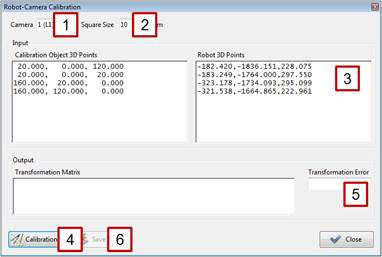
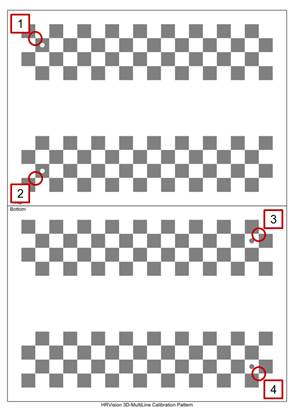
[Step 8] (1) 카메라 번호를 선택합니다. 한 개의 카메라만 사용할 경우에는 [1 (L1)]을 선택하면 됩니다. (2) 보정판의 사각형의 크기를 선택합니다. 일반적으로 [10mm]를 선택하면 됩니다. 사용자가 임의로 보정판을 제작하였을 경우 그것에 맞는 사각형의 크기를 선택하면 됩니다. (3) 보정판의 네 지점을 티칭한 후 X, Y, Z값만 추출하여 [Robot 3D Points]란에 적습니다. 티칭 위치와 순서는 아래의 그림을 참고합니다.
(4) [Calibration] 버튼을 누릅니다. (5) 일반적으로 [Transformation Error]는 1mm를 넘지 않습니다. 그보다 큰 경우는 보정판이 제대로 인쇄가 되지 않았거나 (보정판 체크무늬의 사각형의 크기가 지정된 크기가 아닌 경우), 티칭을 잘못하였거나, 로봇이 캘리브레이션이 되어 있지 않은 경우 등이므로 다시 한번 확인하시기 바랍니다. (6) 모든 것이 제대로 수행되었으면 [Save] 버튼을 눌러 저장한 후 창을 닫습니다. | ||
|