2.2. 외부 고정식 비전
2.2. 외부 고정식 비전
이번 절의 설명은 V2.3.0이상 버전에만 해당합니다. | ||
[Step 1] (1) 보정판을 로봇의 툴에 잘 부착합니다. (보정판은 로봇의 R1축에 연결되어 있어야 합니다. 다른 축에 부착하면 안됩니다.) (2) 캘리브레이션 종료 시까지 보정판은 로봇의 툴에서 흔들리면 안됩니다. (보정판과 로봇 툴 사이의 관계(위치와 방향)는 항상 고정이어야 합니다.) | ||
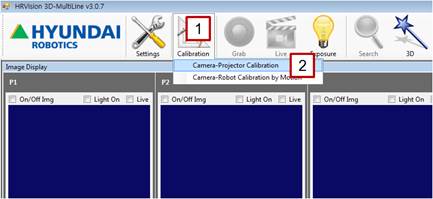
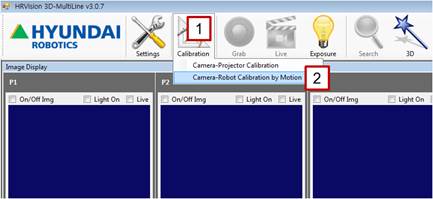
[Step 2] (1) 메인 메뉴에서 [Calibration] 버튼을 클릭합니다. (2) [Camera-Projector Calibration] 버튼을 선택합니다. | ||
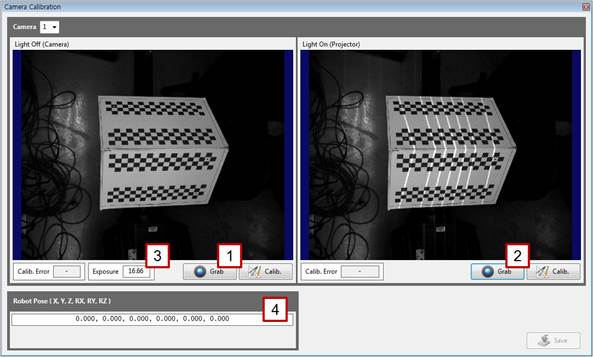
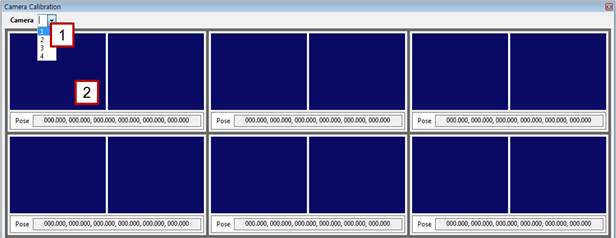
[Step 3] (1) 캘리브레이션을 수행할 카메라 번호를 선택합니다. | ||
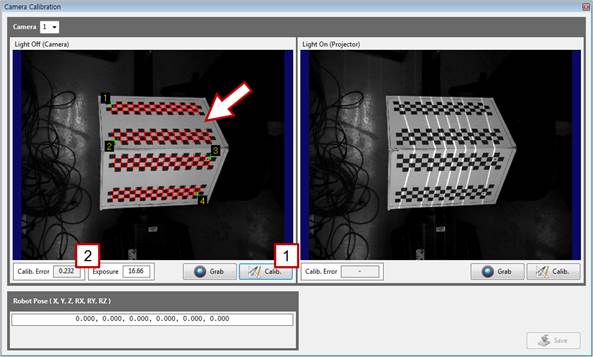
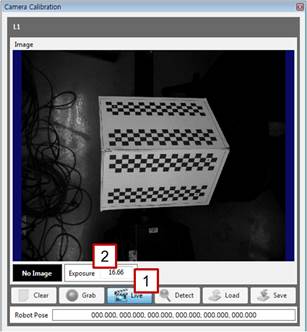
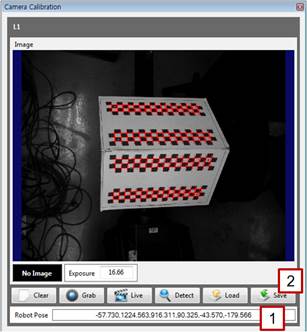
[Step 4] (1) 프로젝터의 패턴 조명을 끄고 왼쪽 [Grab] 버튼을 클릭하고 영상의 초점 및 밝기 상태를 확인합니다. (2) 프로젝터의 패턴 조명을 켜고 오른쪽 [Grab] 버튼을 클릭합니다. 영상의 초점 및 밝기 상태를 확인합니다. (3) 필요한 경우 카메라 노출 값을 [Exposure] 칸에 적어 알맞은 밝기로 조절합니다. (4) 카메라가 외부에 고정되어 있는 경우 [Robot Pose]는 적지 않습니다. | ||
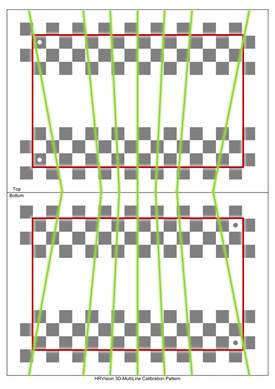
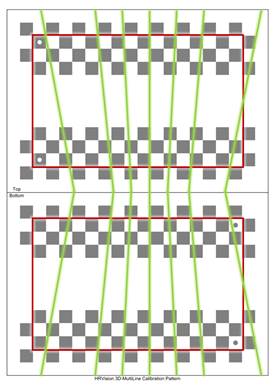
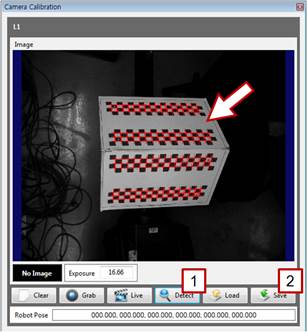
[Step 5] (3) 프로젝터에서 투사한 7개의 선이 보정판의 유효영역(빨간색으로 표시한 양쪽 사각형의 내부 영역) 내에 다 들어오는지 확인합니다. (4) 유효영역을 벗어나는 선이 있으면 보정판의 위치와 방향을 적절히 조절한 후 [Step 4]부터 다시 수행합니다.
| ||
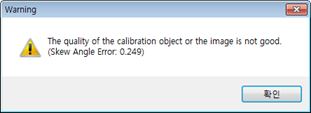
[Step 6] (1) 왼쪽 [Calib.] 버튼을 클릭한 후 왼쪽 화면에서 보정판의 코너가 잘 검출되었는지 확인합니다. (빨간색 십자모양으로 표시됩니다.) (2) 일반적으로 [Calib. Error]의 값은 1.0를 넘지 않습니다. 1.0가 넘는 경우는 카메라의 초점 및 밝기 상태가 적절하지 않거나 보정판의 위치나 방향이 좋지 않아 보정판의 검출 정확도가 떨어지는 경우입니다.
(3) 위와 같은 경고 창이 나타나면 보정판이 기구적으로 잘못 제작되었거나 보정판 종이를 잘못 부착한 것이오니 다시 제작한 후 캘리브레이션을 수행하는 것을 권고합니다.
| ||
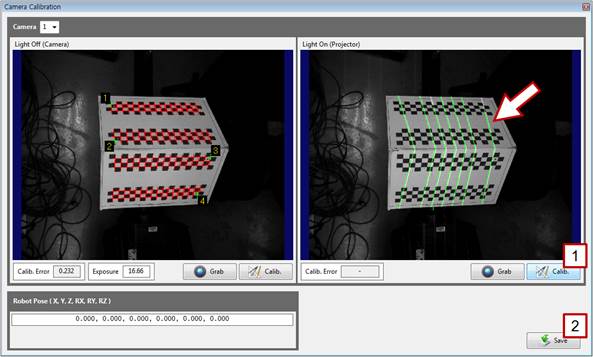
[Step 7] (1) 오른쪽 [Calib.] 버튼을 클릭합니다. (2) 오른쪽 화면에서 패턴 조명이 잘 검출되었는지 확인합니다. 검출이 잘 되었을 경우 [Save] 버튼을 누르고 창을 닫고, 그렇지 않을 경우 [Step 4]부터 다시 수행합니다. | ||
[Step 8] (1) 메인 메뉴에서 [Calibration] 버튼을 클릭합니다. (2) [Camera-Robot Calibration by Motion] 버튼을 선택합니다. | ||
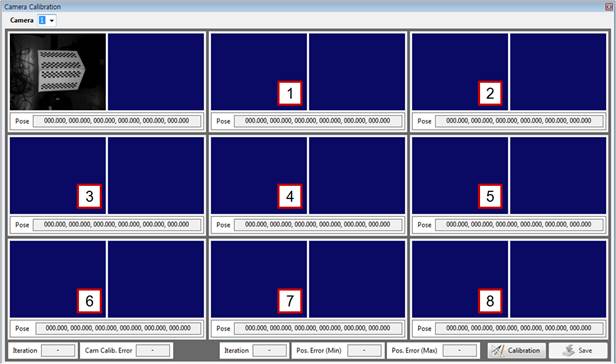
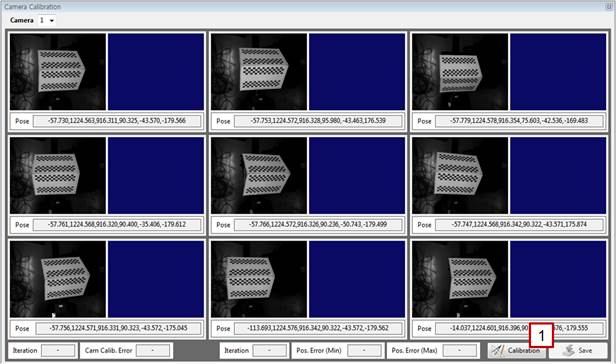
[Step 9] (1) 캘리브레이션을 수행할 카메라 번호를 선택합니다. (2) 첫 번째 왼쪽 영상 화면을 클릭하여 새로운 창을 띄웁니다. 첫 번째 영상의 로봇 및 보정판의 자세는 [Step 2 ~ 7]에서 사용했던 것과 동일해야 합니다. 즉, 로봇이나 보정판을 다른 위치나 방향으로 움직여서는 안됩니다. | ||
[Step 10] (1) Live 버튼을 누른 후, 영상의 초점 및 밝기 상태를 확인합니다. (2) 필요한 경우 카메라 노출 값을 [Exposure] 칸에 적어 알맞은 밝기로 조절합니다. | ||
[Step 11] (1) [Detect] 버튼을 누른 후, 화면에 보정판이 잘 검출되었는지 확인합니다. (2) 검출이 잘 되었을 경우 [Save] 버튼을 누르고 창을 닫습니다. (3) 티치 펜던트로 로봇의 현재 위치를 기록해둡니다. | ||
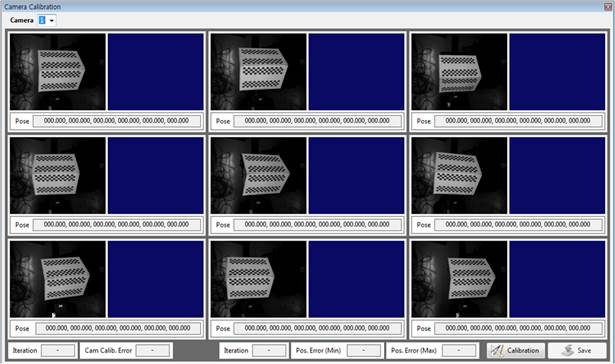
[Step 12] (1) 로봇을 움직여서 보정판의 위치와 방향을 바꿔가며 나머지 8개의 지점에 대해서도 [Step 10 ~ 11]의 절차를 수행합니다. 최소 3지점 이상에서 자세(위치와 방향)가 다른 보정판이 측정되어야 합니다. 보정판의 방향 변화 없이 위치만 변화시키면 캘리브레이션이 수행되지 않습니다. 티치 펜던트에서 RX-, RX+, RY-, RY+, RZ-, RZ+ 버튼을 이용해서 방향을 바꾸어가며, 총 7지점 이상에서 측정하는 것을 권장합니다. | ||
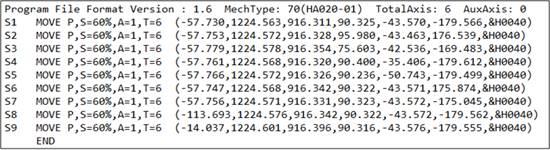
[Step 13] (1) 보정판 영상이 잘 획득되었으면 USB 혹은 HRView 등의 프로그램을 이용하여 보정판 영상에 대응하는 로봇 JOB 파일을 PC로 가져옵니다. (2) 기록된 점의 좌표계가 축각도 혹은 엔코더로 되어 있으면 적절한 좌표계로 변환해줍니다. | ||
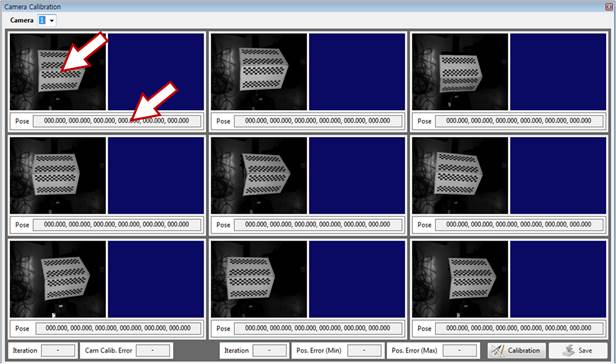
[Step 14] (1) 보정판이 측정된 화면 혹은 Pose 칸을 클릭합니다.
| ||
[Step 15] (1) 보정판 영상에 대응되는 로봇의 포즈를 [Robot Pose] 칸에 입력합니다. 7축 이상의 로봇인 경우에도 6축까지 (X, Y, Z, RX, RY, RZ)만 입력합니다. (2) Save 버튼을 누르고 창을 닫습니다. | ||
[Step 16] (1) 나머지 보정판 영상에 대해 [Step 14 ~ 15]을 반복한 후, [Calibration] 버튼을 누릅니다. | ||
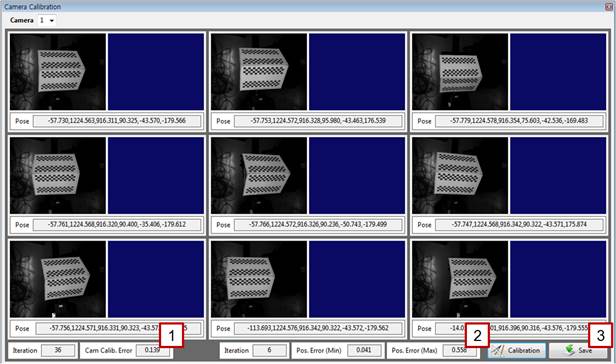
[Step 17] (1) 연산하는 시간이 조금 걸립니다. 잠시 기다리라는 메시지 창이 사라지고, 캘리브레이션이 완료되었다는 창이 나올 때까지 기다립니다. | ||
[Step 18] (1) 일반적으로 [Cam Calib. Error]는 0.5 이하가 나옵니다. (2) 카메라에서 연산한 포즈와 로봇에 기록된 포즈 사이의 에러는 일반적으로 1mm를 넘지 않습니다. [Pos. Error (Max)] 값을 확인하십시오. (3) [Save] 버튼을 클릭하여 캘리브레이션 결과를 저장합니다. (4) [Step 9] 단계로 돌아가서 나머지 카메라에 대해서도 동일한 작업을 반복합니다. | ||
|