2.3.3. 수동 조작
2.3.3. 수동 조작
수동 조그키를 이용하여 로봇에 작업 내용을 지시하고 지시된 작업 내용을 확인하는 모든 행위를 말하며 그 절차는 다음과 같습니다.
(1) 안전펜스 내에 사람이 없는지, 로봇 동작범위 안에 방해되는 물체가 없는지 확인합니다.
(2) 티치펜던트의 제목 표시창이 수동모드인지 확인합니다. 자동모드이면 티치펜던트의 [REMOTE/AUTO/MANUAL]스위치를 [MANUAL] 방향으로 전환합니다.
(3) [SHIFT[고속]+[프로그램/스텝]키를 눌러 원하는 프로그램을 선택합니다. (1-9999)

그림 2.21 프로그램 선택 창 실행화면
▶ 프로그램 List 확인방법
1: 목록보기/감추기: [프로그램] 를 선택하면 아래와 같이 프로그램 List가 나타납니다.
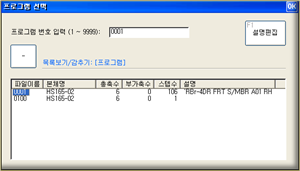
그림 2.22 목록이 표시된 프로그램 선택 창
2: 프로그램 선택 창에서 [SHIFT[고속]+[프로그램/스텝]키를 한번 더 눌러도 상기프로그램 선택 창이 나타납니다.
3: 『[F1]: 서비스』 → 『5: 파일관리』 선택하면 모든 파일이 나타납니다.
4: R코드 17번으로도 모든 파일이 나타납니다.
(4) 티치펜던트의 [Motor ON] 버튼을 누른 후, [MOTOR ON] 램프의 점멸 상태를 확인합니다. 이 조작은 로봇 각축의 모터에 서보전원을 공급하기 위한 준비상태입니다.
(5) 티치펜던트 후면에 있는 [ENABLE] 스위치를 누른 후, [MOTOR ON]램프의 점등상태를 확인합니다. 이 조작에 의해 MSPR, MSHP 릴레이가 동작하고, 모터의 브레이크가 해제되며 서보 ON 상태가 됩니다. 즉, 로봇을 움직일 수 있는 상태가 됩니다.
(6) 속도레벨이나 좌표계의 이동조건에 따라 로봇을 움직이는 조작이 가능합니다.
(7) 로봇의 현재위치를 기억시키고자 하는 위치에서 [위치수정/기록]키를 누르면 스텝이 기록됩니다.
(8) 『[F6]: 명령입력』 키로 스텝에 필요한 펑션(Function)을 기록합니다.
(9) [STEP FWD/STEP BWD]키를 이용하여 작업내용을 확인합니다. [STEP FWD/STEP BWD] 키는 눌려져 있는 동안 로봇이 이동하고 목표 스텝에 로봇이 도달하면 해당 명령어 앞에 수행완료 마크인『.』이 표시되며 정지합니다.
(10) 『[F2]:시스템』메뉴 진입 후 모터 ON 및 조그 동작 시, 소프트 리밋, 암간섭 에러가 해제되므로 안전이 확보된 상황에서 허가 받은 자만 조작하기 바랍니다.
로봇 축간 혹은 주변 설비물과 충돌 위험이 있으며 오조작으로 인한 사고발생에 대한 책임은 제조사에 있지 않습니다. (1.12절 ‘책임’ 참조)