2.5.3.2. Base또는 Robot기록 좌표
2.5.3.2. Base또는 Robot기록 좌표
로봇의 위치와 자세는 좌표계에 따라 다르게 나타낼 수 있습니다. 일반적으로 주행 축이 없는 경우는 Base 좌표와 Robot 좌표가 동일합니다만, 주행 축이 정의된 경우 로봇 툴의 위치와 자세는 Base 좌표와 Robot 좌표에 따라서 다릅니다.
수동모드에서 『[F2]: 시스템』 → 『1: 사용자 환경』 → 『1: Pose 기록 형태 =<베이스> 또는<로봇>』으로 선택되어 기록된 MOVE 명령문에서 [Quick Open]키를 누르면 확인할 수 있습니다.

l Pose 기록 형태를 바꾸기 위해서는 엔지니어에게 문의하십시오.
l 하나의 툴 끝 위치/방향에 대해서,기구특성상 복수의 자세가 존재하므로, 자세를 유일하게 정의하려면 로봇형태의 지정이 필요합니다.
로봇 형태는[포즈변수].CFG(P1.CFG, LP1.CFG) 로 저장되며 CFG의 각 bit할당은 아래와 같습니다.
bit 0: (0: 지정, 1: 미지정)
현재 로봇이 취하고 있는 자세에 대하여 구성 형태를 지정할지 지정하지 않을지를 결정합니다. (미지정이면 형태는 자동으로 결정됩니다.)
bit 1: (0: 앞쪽, 1: 뒤쪽)
로봇의 툴 끝이 로봇 좌표계의 X축 +방향에 있으면 앞쪽, -방향에 있으면 뒤쪽을 선택합니다.
bit 2: (0: 상, 1: 하)
H축과 V축의 관계입니다.


그림 2.40 H축과 V축 자세: 상(좌), 하(우)
bit 3: (0: flip, 1: non-flip)
B축의 좌표가 ‘+’값인 플립(flip)인지 ‘-‘값인 논플립(non-flip)인지를 결정합니다. 그림의 적색 화살표는 손목축의 상부 방향을 나타냅니다.
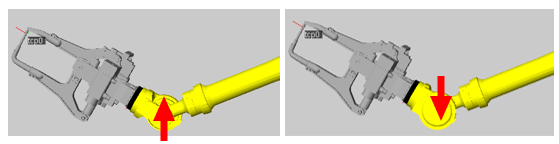
그림 2.41 Flip(좌)/Non-flip(우) 자세
bit 4: (0: |S|<180, 1: |S|>=180)
S축 각도가 어디에 위치해 있는지를 선택합니다.
bit 5: (0: |R2|<180, 1: |R2|>=180)
R2축 각도가 어디에 위치해 있는지를 선택합니다.
bit 6: (0: |R1|<180, 1:|R1|>=180)
R1축 각도가 어디에 있는지를 선택합니다.
bit 7~9: 좌표계를 나타냅니다.
(0: Base, 1: Robot, 2: Angle, 3: Encoder, 4: User, 6: Master 툴 끝)
bit 10~13 : 사용자 좌표계 번호입니다.(1~10)
bit 14: Reserved
미사용 영역으로 차후 예고없이 변경될 수 있습니다.
bit 15: (0: |B|<180, 1:|B|>=180)
B축 각도가 어디에 있는지를 선택합니다. (B축 동작범위가 180˚이상인 기종인 경우에만 의미가 있습니다.).
l 좌표계 지정은 사용자의 편의를 위해 다음과 같이 맨 뒤에 첨자로 구분합니다.
베이스 좌표계 = (X,Y,Z,Rx,Ry,Rz,cfg)
로봇 좌표계 = (X,Y,Z,Rx,Ry,Rz,cfg)R
축 좌표계 = (S,H,V,R2,B,R1)A
엔코더 = (S,H,V,R2,B,R1)E
사용자 좌표계 = (X,Y,Z,Rx,Ry,Rz,cfg)U è 번호 미지정 방식
사용자 좌표계 = (X,Y,Z,Rx,Ry,Rz,cfg)Un è 번호 지정 방식(1~10)