9.2.1. 숨은 포즈 MOVE문
9.2.1. 숨은 포즈 MOVE문
숨은 포즈 MOVE문 (티치펜던트의 [기록]키에 의해 기록된 스텝, 즉 포즈변수를 포함하지 않는 MOVE문)에서 현재 스텝의 위치를 확인 및 수정하는 기능입니다.
(1) 숨은 포즈로 기록된 이동명령(MOVE문)에서 [Quick Open]키를 누르면 다음의 화면과 같이 현재 스텝의 위치가 나타납니다.
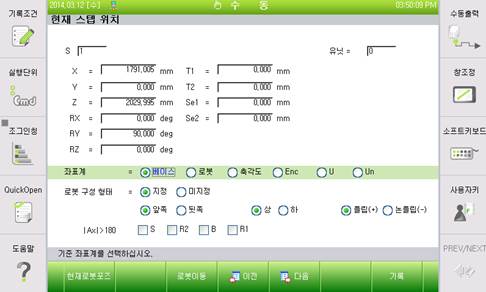
(2) 항목에 커서 행을 이동시킵니다. 수치를 입력하는 경우는 입력프레임에 숫자를 입력한 후 [ENTER]키를 누르면 내용이 반영됩니다.
(3) 라디오 버튼을 조작할 때는 [SHIFT]+[←][→]키를 누르십시오.
(4) 스텝 번호 (S)
현재 스텝 번호를 표시합니다. 다른 스텝번호를 입력하고 [ENTER]키를 누르면, 그 스텝으로 이동합니다.
(5) 현재스텝 좌표값
스텝의 요소값들을 표시합니다. 항목을 변경할 때는 커서키를 이용해 이동하며, 수정을 할 때에는 숫자입력 후에 [ENTER]키를 누르면 입력한 내용이 반영됩니다. 단, 좌표계 형식이 Encoder로 선택되었을 때는 변경되지 않습니다.
(6) 좌표계 형식
현재 스텝의 위치를 Base 좌표계, Robot 좌표계,축각도, 사용자 좌표계, Encoder 값 중 어느 형식의 좌표계로 표현할지 선택합니다.
(7) 로봇 구성 형태
좌표계 형식이 Base나 Robot일 때 표시되며,로봇의 위치를 기술할 때 그 기구특성상 복수(複數)의 해(解)가 존재하므로, 그 형태를 유일하게 기술하기 위한 로봇형태(configuration)를 지정합니다. 로봇 구성 형태의 자세한 내용은 ‘2.5.3. 스텝위치 기록/변경’을 참조하십시오.
(8) 『[F1]: 현재로봇포즈 / 원래값』
한번 누르면,현재 로봇이 취하고 있는 자세의 값이 표시됩니다. 또 한번 누르면, 현재 스텝 원래의 숨은 포즈값이 표시됩니다. (토글동작)
(9) 『[F3]: 로봇이동』
누르고 있으면 기록된 스텝의 위치로 로봇이 움직입니다. (조그)
(10) 『[F4]: 이전』/『[F5]: 다음』
이전 스텝/ 다음 스텝의 정보를 보여줍니다.
(11) 『[F7]: 기록』
작업 프로그램에 반영합니다. 기록하지 않고 [ESC]키를 눌러 종료하면 화면에 표시된 내용이 반영되지 않습니다.

l 로봇 구성 형태를 미지정으로 설정하는 경우 로봇은 현재 위치에서 가장 가깝게 로봇형태를 지정합니다.
l 로봇 구성 형태의 앞쪽, 뒤쪽 구성에 따라 하기와 같은 로봇 형태를 취하게 됩니다.
앞쪽 뒤쪽
l 로봇 구성 형태의 상, 하 구성에 따라 하기와 같은 로봇 형태를 취하게 됩니다.
앞쪽 뒤쪽
l 로봇 구성 형태의 플립(+), 논플립(-)의 구성에 따라 하기와 같은 로봇 형태를 취하게 됩니다.
앞쪽 뒤쪽