6.4.2. 모터 교환 방법
6.4.2. 모터 교환 방법
(1) 제어기를 티칭모드로 하고, 운전준비 [ON] 상태로 합니다. 운전준비 [ON]이 안될 경우, 암이 낙하하지 않도록 하고, 충분히 고정되었는지를 확인해 주십시오. 이후로는(4)작업부터 합니다.
(2) 모터를 교환하는 축은 기본자세를 취합니다.
(3) H축의 경우: [그림6.2]을 참조
암 낙하 방지를 위하여 고정용 핀 또는 볼트를 삽입합니다.
손목 축(R2, B, R1)의 경우 : 각축 SACLE 및 홈을 이용,원점을 맞춥니다.
(4) 제어기 전원을 [OFF] 상태로 하고 1차 전원을 [OFF] 합니다.
(5) 모터 배선을 분리해 주십시오.
(6) 모터 취부 볼트를 제거해서 모터를 로봇 본체에서 떼어 냅니다.
H, V축 모터를 떼어낼 때, 모터 축에 취부된 기어로 인해, 오일씰의 립이 손상되지 않도록 하십시오.
(7) 모터 축에 취부되어 있는 기어를 분리 하십시오.
이때, 모터 축에 강한 충격이 가해지지 않도록 주의하십시오.
(8) 조립될 모터의 축에 그리스를 얇게 도포하고, 기어를 조립합니다.
이때, 모터 축에 기어를 체결하는데 사용되는 볼트는 세척, 탈지 후 나사부에 풀림 방지용 본드 (Loctite 243)을 도포한 후 토크 렌치를 사용하여 규정된 토크로 체결하십시오. 또한, 볼트체결 순번을 대칭방향으로 천천히 체결하십시오.
(9) 오일 씰의 립 부위에 그리스를 소량 도포하고 기어 치면에 그리스를 적당량 도포해서, 모터를 로봇 본체에 조립 하십시오. 주축 모터를 취부할 때는 모터 축에 취부된 기어에 의해, 오일 씰의 립이 손상되지 않도록 하십시오.
(10)모터 배선을 접속하십시오.
(11)H, V축 모터를 교환한 경우, 유출된 그리스만큼 신규로 보충해 주십시오.
(12)모터 교환한 축의 엔코더를 리셋합니다.
 주의 사항
주의 사항
엔코더 보정을 하기 전에, 일단 운전준비 [ON] 으로 해서, 티치 펜던트의 Enable 스위치를 2∼3초간 누르면서 전원이 들어가는지 확인합니다.
(13)모터 교환한 축의 엔코더를 제어기 조작설명서 [엔코더 보정]을 참조해서 보정하십시오.
(14)H, V축 ARM 낙하 방지용 핀 또는 볼트를 분해 합니다.
(15)로봇 동작에 문제가 없는지 확인 합니다.
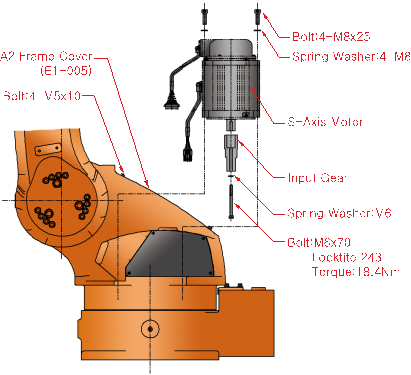
그림 6.1 S축 모터/감속기 분해도
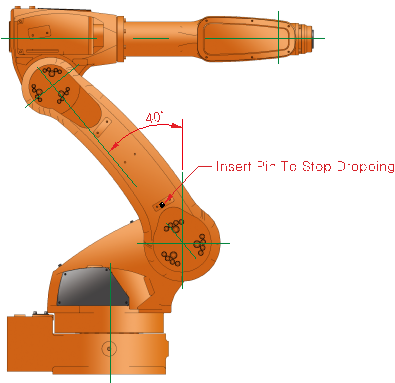
그림 6.2 H축 모터 교체시의 로봇 자세
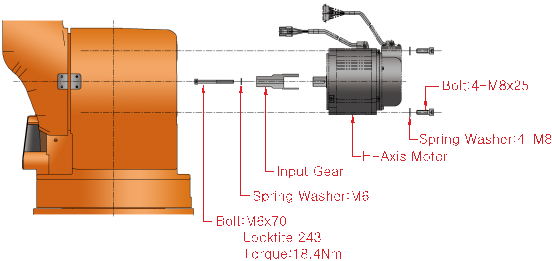
그림 6.3 H축 모터 교체

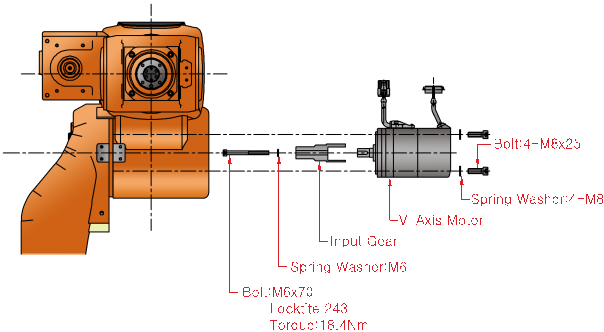
그림 6.4 V축 모터
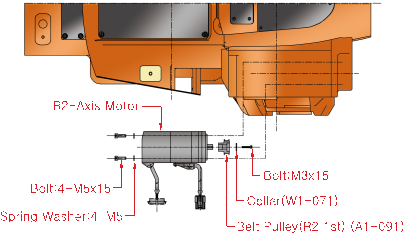
그림 6.5 R2축 모터
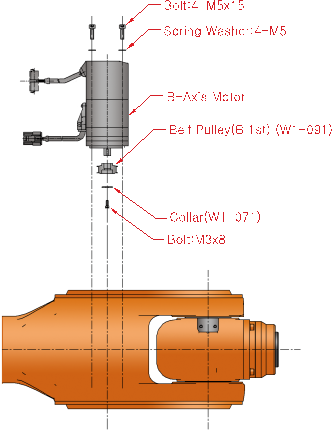
그림 6.6 B축 모터
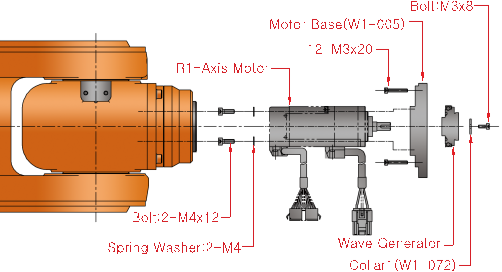
그림 6.7 R1축 모터