6.4.6. H, V축 감속기 교환 방법 [HA006L]
6.4.6. H, V축 감속기 교환 방법 [HA006L]
(1) 제어기를 티칭모드로 하고, 운전준비 [ON] 상태로 합니다. 운전준비 [ON]이 안될 경우, 암이 낙하하지 않도록 하고, 충분히 고정되었는지를 확인해 주십시오. 이후로는(4)작업부터 합니다.
(2) 암 낙하 방지를 위하여 아래와 같이 로봇자세를 취합니다.
H축의 경우: [그림6.21]을 참조
V축의 경우: [그림6.23]을 참조
(3) 제어기 전원을 [OFF] 상태로 하고 1차 전원을 [OFF] 합니다.
(4) 모터 배선을 분리 후, 모터 취부 볼트를 제거해서 모터를 로봇 본체에서 떼어냅니다.
(5) 아래 그림을 참조하면서, 감속기의 출력단 볼트를 제거합니다.
H축의 경우: [그림6.22]을 참조
V축의 경우: [그림6.24]을 참조
(6) 감속기의 출력단 위의 부분을 크레인을 이용해 천천히 빼냅니다.
(7) (5)의 그림을 참조하면서, O-RING을 분리합니다.
H축의 경우: O-RING AS568-163
V축의 경우: O-RING AS568-156
(8) 감속기의 입력단 볼트를 제거 후, 감속기를 분리합니다.
(9) 교체할 감속기에 O-RING을 새 제품으로 교체 후, 감속기를 조립합니다. 이 때, 감속기를 체결하는데 사용되는 볼트는 세척, 탈지 후 토크렌치를 사용하여, 규정된 토크로 체결하십시오. (Torque 15.3 Nm)
또한, 볼트 체결 순번을 대칭 방향으로 천천히 체결하십시오.
H축 의 경우: O-RING AS568-163 / G175
V축 의 경우: O-RING AS568-156 / G130
(10)(6)에서 빼 낸 출력단 위의 부분을 크레인을 이용하여 천천히 감속기에 조립합니다. 이 때, 감속기를 체결하는데 사용되는 볼트는 세척, 탈지 후 토크렌치를 사용하여, 규정된 토크로 체결하십시오. (Torque 36.5 Nm)
또한, 볼트 체결 순번을 대칭 방향으로 천천히 체결하십시오.
(11)[6.4.2]을 참조하며 모터를 조립 후, 모터 배선을 연결하십시오.
(12)지정된 그리스를 보충해 주십시오.
(13)로봇 동작에 문제가 없는지 확인합니다.
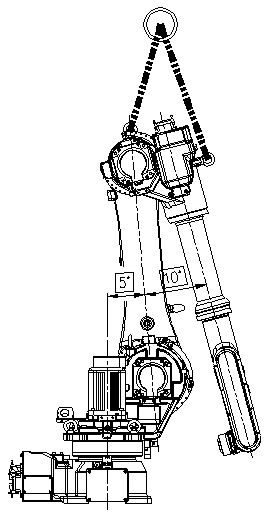
그림 6.21 H축 감속기 교체시의 로봇 자세 [HA006L]

그림 6.22 H축 감속기 분해도[HA006L]

그림 6.23 V축 감속기 교체시의 로봇 자세[HA006L]

그림 6.24 V축 감속기 분해도[HA006L]