3.6.1. 허용 부하 토크 산정
3.6.1. 허용 부하 토크 산정
로봇의 손목축 선단에 부착될 부하는 허용 중량, 허용 부하토크, 허용 관성 모멘트에 의해서 규제 됩니다. 부하 토크 및 관성 모멘트 계산 시 사용되는 좌표계의 방향은 로봇 베이스 좌표계의 방향과 동일합니다. R2축에 대한 검토는 B축과 동일한 방식으로 이루어집니다.
n Step 1
B축 회전 중심에서의 무게 중심의 위치를 계산(LX, LY, LZ)
LX: X축 방향 무게중심 위치
LY: Y축 방향 무게중심 위치
LZ: Z축 방향 무게중심 위치
n Step 2
B축, R1축에서부터 무게 중심까지 거리 계산
 ,
, 
LB : B축 회전 중심에서 무게중심까지의 거리
LR1 : R1축 회전 중심에서 무게중심까지의 거리
n Step 3
계산된 거리로부터 부하 토크를 계산


 : B축 회전 중심에서의 부하 토크
: B축 회전 중심에서의 부하 토크
 : R1축 회전 중심에서의 부하 토크
: R1축 회전 중심에서의 부하 토크
 : 부하의 질량
: 부하의 질량
 : 중력가속도
: 중력가속도
n Step 4
허용 부하 토크 표를 기준으로 Step 3에서 계산된 부하 토크가 제한치 이하인지 확인
n Note: 부하 질량이 하기의 토크 선도 상의 질량과 유사할 경우, 부하 토크 검증은 Step 3,4 대신 Step 2에서 계산된 거리가 토크 선도 내에 분포하는지 체크함으로 대체할 수 있습니다. 토크 선도 내에 위치할 경우, 계산된 부하 토크가 허용 부하 토크보다 작은 것이고, 토크 선도 밖에 위치할 경우, 계산된 부하 토크는 허용 부하 토크보다 큰 것입니다.

그림 3.7 손목 축 토크 선도:[HH130L]
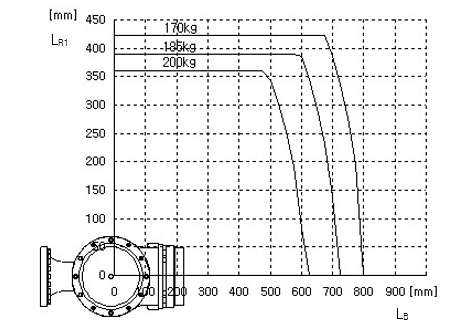
그림 3.8 손목 축 토크 선도:[HH200]
 허용 부하 토크
허용 부하 토크
표 3‑1 허용 부하 토크
로봇모델 | 허용 부하 토크 | ||
R2축 회전 | B축 회전 | R1축 회전 | |
HH130L | 1,030N·m(105kgf·m) 이내 | 490 N·m(50 kgf·m) 이내 | |
HH200 | 1,330N·m(136kgf·m) 이내 | 706 N·m(72 kgf·m) 이내 | |