6.5.1. 원점 맞추기
6.5.1. 원점 맞추기
(1) 제어기를 티칭모드에 맞추고 운전 준비를 [ON]으로 하여 주십시오
이상으로 인하여 운전준비를 [ON]할 수 없는 경우는 브레이크 해제 스위치를 사용하여 로봇의 기준 위치를 맞추어 주십시오.
(2) 각 축을 기본 자세까지 움직여 스케일의 눈금선을 일치시키십시오.
(3) 엔코더 리셋을 하십시오. 엔코더 리셋 방법은 『6.5.2 엔코더 리셋』을 참고하십시오.
(4) 엔코더 보정을 해 주십시오. 『제어기 조작설명서』을 참조하십시오.
(5) 로봇 동작에 문제가 없는지를 확인하십시오.
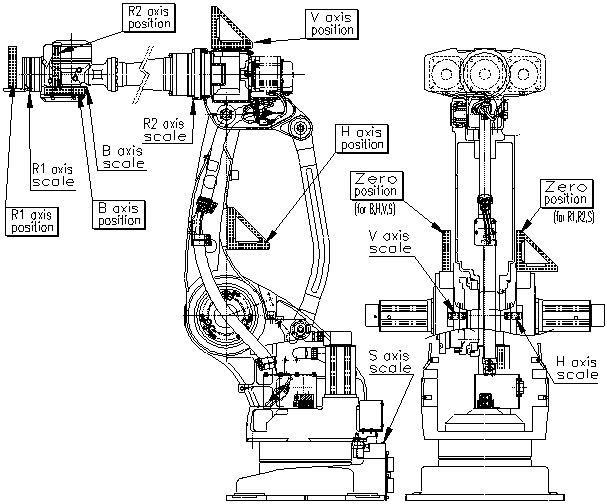
그림 6.1 원점 설정 방법 [HR050/HR030L]
n HR050/HR030L 로봇의 각축의 원점 설정 방법으로 수준계 와 위치확인용 블록을 이용한 정밀 원점 맞추기 와 스케일을 이용한 방법이 있습니다 정밀 원점 맞추기는 로봇 출하시 또는 Overhaul시 적용하는 방법입니다. 사용자가 모터를 교환할 경우, 각축의 원점 맞추기 스케일을 이용하여 엔코더를 셋팅하여 주십시오
n 특히, 손목축의 원점 맞추기를 할 때는, 로봇의 손목축 구조상 있을 수 있는 축 간섭을 고려해야 합니다. 그러므로 손목축의 원점 맞추기는 반드시 R2, B, R1축 순서대로 해주십시오.