3.6. 손목 축 부하 허용치
3.6. 손목 축 부하 허용치
로봇의 손목축 선단에 부착될 부하는 허용 중량, 허용 부하토크, 허용 관성 모멘트에 의해서 규제 됩니다.
 허용 가반 중량 :
허용 가반 중량 :
표 3‑1 허용 가반 중량
로봇 모델 | 허용 가반 중량 |
HS165DC | 1,619N (165kgf) 이내 |
 허용 부하 토크
허용 부하 토크
표 3‑2 허용 부하 토크
로봇모델 | 허용 부하 토크 | ||
J3축 회전 | J4축 회전 | J5축 회전 | |
HS165DC | 980N·m(100kgf·m) 이내 | 490 N·m (50 kgf·m) 이내 | |
허용 관성모멘트
표 3‑3 허용 관성 모멘트
로봇모델 | 허용 관성 모멘트 | ||
J3축 회전 | J4축 회전 | J5축 회전 | |
HS165DC | 64.68kg·m²(6.6kgf·m·s²) | 17.64kg·m²(1.8kgf·m·s²) | |
[그림 3.6]을 참고하여 부하가 허용조건을 초과하지 않도록 사용하여 주십시오.
[그림 3.6]은 취부되는 부하가 질점에 있는 경우, 그 질점이 위치할 수 있는 가능 범위를 표시합니다. 하지만 실제 부하(End Effector)가 질점에 있는 경우는 거의 없으므로 각 축의 관성모멘트를 구하여 평가하여 주십시오. 취부되는 부하를 질점으로 생각할 경우의 예를 들어보면,
(예)로봇형식은 【 HS165DC 】이고 취부되는 부하의 중량이 165Kg일 때
n J5축 중심에서의 허용중심위치
① 허용토크에서 보았을 때의 허용중심위치
LR1 ≤ (허용토크) / (부하중량)
LR1 = 490 N·m / (165Kg×9.8 m/s2) = 0.30 m
② 허용관성모멘트에서 보았을 때의 허용중심위치
LR1 ≤ (허용관성모멘트/부하중량 )1/2
= (17.64 kg·m2 / 165 kg )1/2 = 0.33 m( > 0.30 m)
이상의 결과에서 J5축 중심에서의 거리는 허용 토크에 의해 규제되고, 0.30 m 이내가 됩니다.
n J4축 중심에서의 허용중심위치
① 허용토크에서 보았을 때의 허용중심위치
LB ≤ (허용토크) / (부하중량)
LB = 980 N·m / (165Kg×9.8 m/s2) = 0.61 m
② 허용관성모멘트에서 보았을 때의 허용중심위치
LB ≤ (허용관성모멘트/부하중량 )1/2
= (64.68 kg·m2 / 165 kg )1/2 = 0.63 m(> 0.61 m)
이상의 결과에서 J4축 중심에서의 거리는 허용 토크에 의해 규제되고, 0.61 m 이내가 됩니다.
n Torque Map
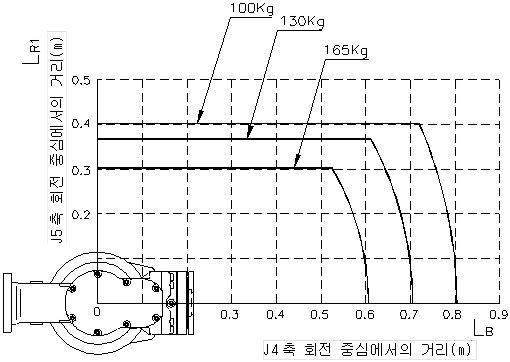
그림 3.6 손목 축 토크 선도