3.2. 컨베이어 정수 자동설정
3.2. 컨베이어 정수 자동설정
컨베이어 정수란 컨베이어 형태가 직선인 경우는 컨베이어가 1m 이동한 경우, 원형인 경우는 컨베이어가 1deg 회전한 경우 발생하는 펄스수를 의미합니다.
컨베이어 정수를 자동으로 계산하기 위해서는 『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『4: 컨베이어 동기』 → 『2: 제1 파라미터』의 설정 화면에서 『[F2]: 정수설정』을 누릅니다.
(1) 아래의 그림과 같이 작업물이 리밋스위치를 치고 들어간 후 컨베이어를 정지합니다.

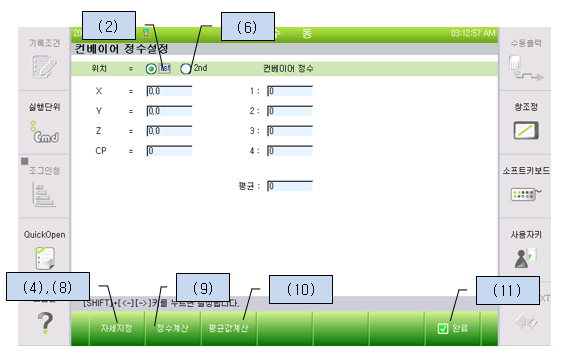
(2) 위치를 <1st>로 선택합니다.
(3) 컨베이어상의 작업물에 대한 특정위치로 로봇의 툴 끝을 이동합니다.
(4) 『[F1]: 자세지정』을 누르면 현재 로봇의 위치와 함께 컨베이어 펄스 값이 기록됩니다.
(5) 아래의 그림과 같이 컨베이어를 구동하여 작업물을 이동합니다. (1m이상)

(6) 위치를 <2nd>로 선택합니다.
(7) (3)에서 지정한 특정위치로 로봇의 툴 끝을 이동합니다.
(8) 『[F1]: 자세지정』을 누르면 현재 로봇의 위치와 함께 컨베이어 펄스 값이 기록됩니다.
(9) 『[F2]: 정수계산』을 누르면 컨베이어 정수를 계산하고 컨베이어 정수 항목에 기록합니다.
(1)~ (9)의 과정을 반복하면 총 4개의 컨베이어 정수를 계산할 수 있습니다.
(10)『[F3]: 평균값계산』을 누르면 기록된 컨베이어 정수들의 평균값이 계산됩니다.
(11)『[F7]: 완료』를 누르면 평균값이 컨베이어 정수로 등록됩니다.