2.1.4.2. 로봇 2
2.1.4.2. 로봇 2
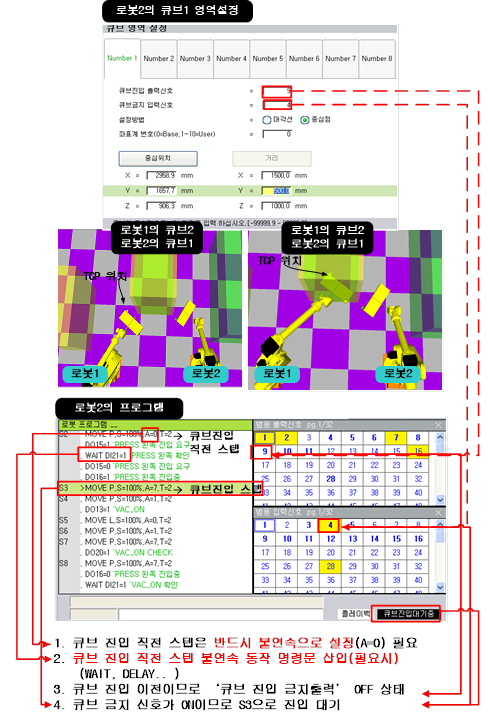
(1) 로봇 2이 공통 큐브 영역(큐브1)으로 진입 직전
à로봇 1이 먼저 진입하여 작업 중이므로 자동 정지 대기(“큐브진입 대기 중”)
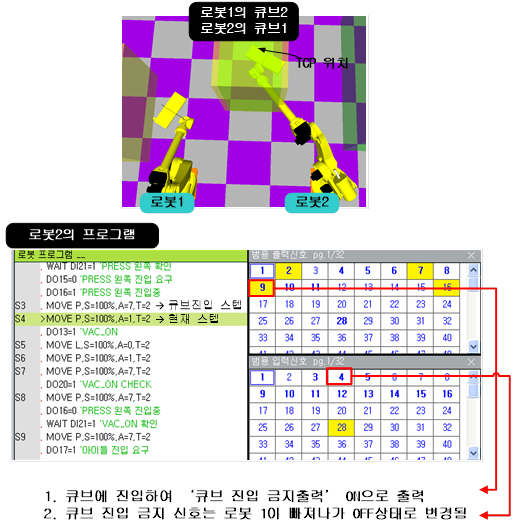
(2) 로봇 2가 로봇 1이 빠져 나간 공통 큐브 영역(큐브1)으로 진입
à로봇 2의 큐브진입 출력신호 ON
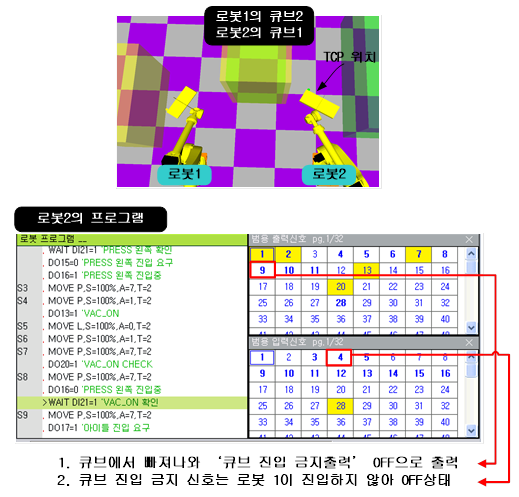
(3) 로봇 2가 작업영역에서 빠져나감
à로봇 2의 큐브진입 출력신호 OFF로 클리어 됨.
(1) 로봇 2이 공통 큐브 영역(큐브1)으로 진입 직전
à로봇 1이 먼저 진입하여 작업 중이므로 자동 정지 대기(“큐브진입 대기 중”)
(2) 로봇 2가 로봇 1이 빠져 나간 공통 큐브 영역(큐브1)으로 진입
à로봇 2의 큐브진입 출력신호 ON
(3) 로봇 2가 작업영역에서 빠져나감
à로봇 2의 큐브진입 출력신호 OFF로 클리어 됨.