2.1.1. 비상정지선의 결선
2.1.1. 비상정지선의 결선
협조 동작 중에 비상정지를 하는 경우에 통신으로 서로의 상태를 모니터링하고 있어, 상대의 로봇도 정지하도록 되어있지만 하드웨어적인 신호가 우선하므로 협조로봇 상호간의 위치가 어긋나게 됩니다. 비상정지 시 협조위치의 어긋남을 최소화하기 위해서 제어기의 외부 비상정지 결선을 하십시오.
Hi5 제어기에는 사용자용 외부 비상정지가 준비되어 있습니다. 외부의 비상정지 결선은 아래의 그림과 같습니다.
로봇 협조 기능을 사용할 때는 동시에 비상정지가 각 제어기에 입력될 수 있도록 하는 별도의 비상정지 스위치를 설치하여야 합니다. 사용자용으로 마련된 외부 비상정지 결선을 이용하여 아래 같이 하나의 비상정지로 통합하여 사용하십시오. 비상정지시의 협조위치 어긋남이 최소화됩니다.
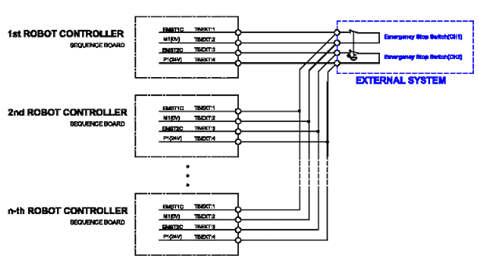
그림 2.1 로봇 협조용 비상정지의 결선
주의사항
l 협조 중 비상정지 시 상대적인 협조 위치가 어긋남이 발생 할 수 있습니다.
l 핸들링 기능으로 적용할 때 협조 동작중의 협조 어긋남(비상정지 시 오차, 동기 오차, 캘리브레이션 오차, 궤적 오차)을 흡수하기 위해서는 플로팅 기구를 설치하여야 합니다.
l 핸들링 기능으로 적용할 때 플로팅 기구는 협조 로봇이 2대일 때 최소 1대 이상 설치할 것을 권장합니다.