5.4. 협조 재생 정지/재기동
5.4. 협조 재생 정지/재기동
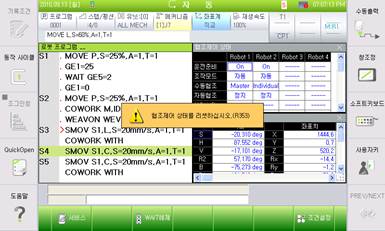
(1) 협조동작 중 사용자가 정지 명령(외부정지, 내부정지)을 입력하면 협조동작 중인 로봇이 모두 정지합니다.
(2) 정지 후 재기동시에는 Slave 로봇들을 먼저 start 기동한 후 Master 로봇을 기동합니다. Slave 로봇이 협조 대기 상태에 있지 않을 경우 에러가 발생합니다.
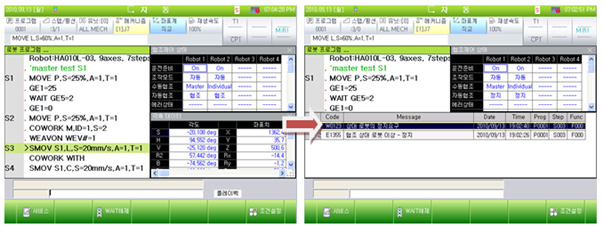
(3) 협조동작 중에 정지 후 스텝 번호를 변경하고 재생하는 것은 협조 재생 상태가 무효인 경우에만 가능합니다. 협조 중에 정지하고 스텝을 변경한 후 재생하려면 사용자에 대한 경고의 의미로 R353 코드를 입력해 줄 것을 요구합니다.
(4) 협조제어 상태 리셋(R353)을 입력한 경우는 협조 상태를 해제하고 동작합니다.협조 상태를 유지한 채 동작하려면 정지 스텝 번호를 지정하고 기동합니다.