5.5. 로봇 락 기능(Robot Lock Playback)
5.5. 로봇 락 기능(Robot Lock Playback)
(1) [F7]: 조건 설정』 → 『5: 로봇 Lock』을 <유효>로 설정합니다.

(2) 로봇 Lock을 선택하면 화면 상단의 메커니즘 창에 자물쇠 표시가 나타납니다.

(3) Master 로봇을 로봇 Lock <유효>로 설정하고 재생하면 Slave는 협조 동작을 수행하고 Master 로봇은 동작하지 않고 축 데이터 모니터는 변경됩니다.
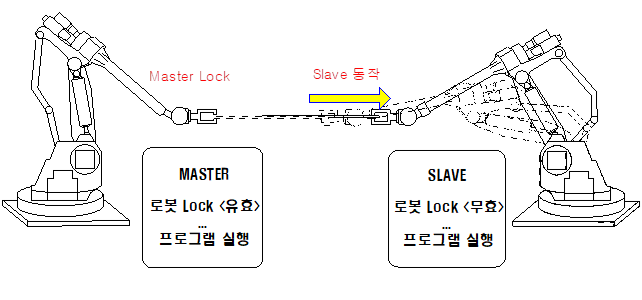
그림 5.6 로봇 Lock 기능(Master Lock)
(4) Slave 로봇을 로봇 Lock <유효>로 설정하고 Master 로봇을 <무효>로 설정한 경우Master 로봇은 정상 동작하고 Slave 로봇은 정지한 채 모니터링 데이터만 움직입니다.
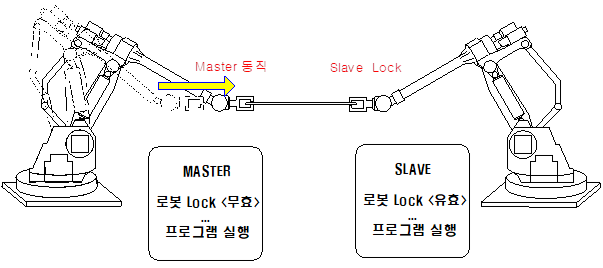
그림 5.7 로봇 Lock 기능(Slave Lock)
(5) Master와 Slave를 모두 로봇Lock <유효>로 설정하면Master/Slave 모두 정지한 채 프로그램을 실행합니다.
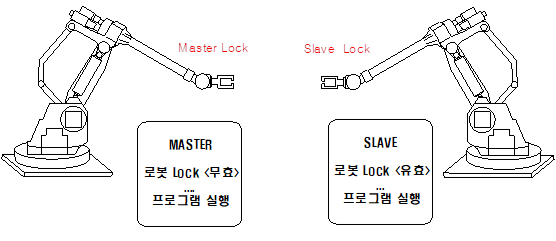
그림 5.8 로봇 Lock 기능(Master, Slave Lock)
주의사항
l 로봇 Lock <유효> 설정한 로봇은 움직이지 않으므로 다른 로봇과 간섭이 되지 않는 위치로 이동 후 프로그램을 실행하여 주십시오.
l 로봇 Lock 설정을 다시 <무효>로 변경 후 실행할 때는 로봇의 위치와 스텝의 위치가 대응하지 않으므로 프로그램 처음부터 실행시켜 주십시오.