4.2.1. PC 측 루프백 시험 방법
4.2.1. PC 측 루프백 시험 방법

그림 4.6 RS-232C 통신설정 대화상자
(1) RS-232C 연결이 정상적인지를 시험하려면, 먼저 통신설정 대화상자를 열고  버튼을 눌러 통신을 연결합니다.
버튼을 눌러 통신을 연결합니다.  버튼을 누르면, 아래와 같이 RS-232C 통신시험 대화상자가 나타납니다.
버튼을 누르면, 아래와 같이 RS-232C 통신시험 대화상자가 나타납니다.
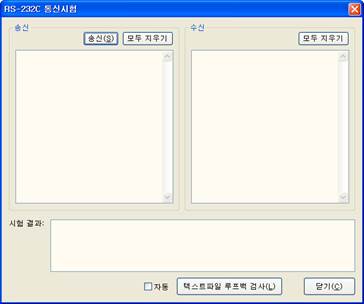
그림 4.7 RS-232C 통신시험 대화상자
표 4‑1 RS-232C 통신시험 대화상자
송신 그룹상자 | 송신 버튼 | 송신 편집상자에 입력한 문자열을 RS-232C로 전송합니다. (앞부분의 500byte 만 송신됩니다.) |
모두 지우기 버튼 | 송신 편집상자에 있는 문자열을 모두 지웁니다. | |
편집상자 | 송신할 문자열을 기록하는 위치입니다. 텍스트파일 루프백 검사 시에는 전송하는 문자열을 표시해줍니다. | |
수신 그룹상자 | 모두 지우기 버튼 | 수신 편집상자에 있는 문자열을 모두 지웁니다. |
편집상자 | RS-232C로 수신되는 문자열을 표시해줍니다. | |
시험결과 편집상자 | 텍스트파일 루프백 검사의 결과를 표시해줍니다. 송신한 바이트 수와 수신한 바이트 수, 일치여부, 불일치한 그 위치와 그 문자열 등이 표시됩니다. | |
자동 체크박스 | 텍스트파일 루프백 검사를 자동으로 반복할 지 여부를 선택합니다. | |
텍스트파일 루프백 검사 버튼 | 텍스트파일 루프백 검사를 수행합니다. 내장된 텍스트파일로부터 긴 문자열데이터를 읽어 RS-232C로 송신한 후 루프 백에 의해 수신된 데이터와 비교하여 일치여부를 검사합니다. 송수신 데이터들은 각자 편집상자에 표시됩니다. | |
닫기 버튼 | RS-232C 통신시험 대화상자를 닫습니다 | |
(2) PC의 시리얼포트 중 선택한 COM포트가 정상적으로 동작하는지를 확인하는 방법은 다음과 같습니다. 먼저 [그림4.8]과 같이 PC의 COM포트에 장착한 케이블의 커넥터에서 2번과 3번 핀을 서로 단락(short)시킵니다.
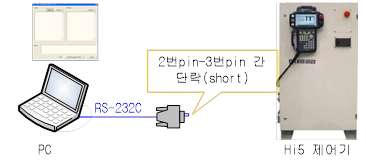
그림 4.8 PC측 송수신 단락
(3) 텍스트파일 루프백 검사 버튼을 누르면, 내장된 텍스트파일을 송수신하며 그 내용을 편집상자에 보여줍니다. [그림 4.9]과 같이 나타나면 정상입니다.
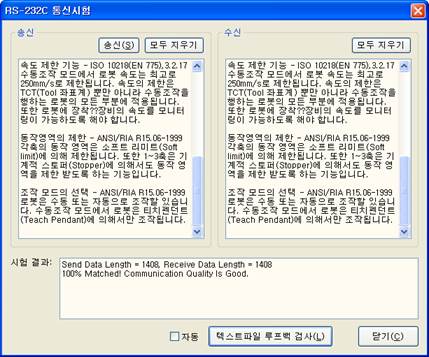
그림 4.9 텍스트파일 루프백 검사
(4) 시험 결과에 따른 결론은 아래 [표 4-2]와 같습니다.
표 4‑2 PC측 텍스트파일 루프백 검사 결과
결과 | 결론 (추정 가능한 원인들) |
수신 편집상자에 송신한 데이터가 그대로 출력되고, 시험결과가 100% Matched! 라고 나옴. | PC의 COM 포트의 동작이 정상 |
수신 편집상자에 아무 데이터도 나오지 않음. | - 케이블 단선. - 케이블을 PC의 다른 COM포트에 잘못 연결함. - PC의 COM포트 고장 - 2번, 3번 핀이 short되지 않았음. - USB-Serial 제품(사용시)의 설정오류, 불량 |
수신 편집상자에 송신 데이터와 달리 일부 손상된 문자열이 나타남. | - PC의 COM 포트의 송수신 기능이 부분적으로 불량함. H/W의 고장여부 점검 필요. - USB-Serial 제품(사용시)의 불량, 성능부족 |
(5) 로봇제어기와의 시리얼통신 연결이 정상적인지 확인하는 방법은 다음과 같습니다. 먼저 [그림 4.10]과 같이 PC의 COM포트와 로봇제어기를 시리얼통신 케이블로 연결합니다.
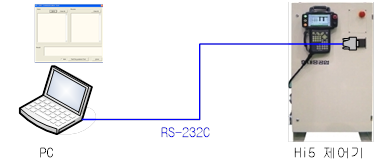
그림 4.10 PC - 제어기간 RS-232C연결
(6) 로봇제어기의 티치펜던트에서 『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『3: 시리얼 포트』 → 『1: 시리얼 포트 #1』(혹은, 『2: 시리얼 포트 #2』) 화면으로 진입하여, 통신 파라미터를 PC측과 일치하도록 설정한 후, [그림 4.11]과 같이 “에코”를 <유효>로 설정합니다.

그림 4.11 시리얼포트 “에코”를 <유효>로 설정
(7) 텍스트파일 루프백 검사 버튼을 누르면, 내장된 텍스트파일을 송수신하며 그 내용을 편집상자에 보여줍니다. 시험 결과에 따른 결론은 아래 [표 4-3]과 같습니다.
표 4‑3 PC - 제어기 텍스트파일 루프백 검사 결과
결과 | 결론 (추정 가능한 원인들) |
수신 편집상자에 송신한 데이터가 그대로 출력되고, 시험결과가 100% Matched! 라고 나옴. | 로봇제어기와 PC간 시리얼통신 연결이 정상적임. |
수신 편집상자에 아무 데이터도 나오지 않음. | (PC측 루프백 시험이 정상인 경우,) - 케이블의 RX, TX 연결 잘못. - 케이블을 로봇제어기의 다른 COM포트에 잘못 연결함. - 로봇제어기의 COM포트 고장. - 로봇제어기 캐비넷 내부의 시리얼 케이블 단선. |
수신 편집상자에 송신 데이터와 달리 일부 손상된 문자열이 나타남. | (PC측 루프백 시험이 정상인 경우,) 로봇제어기의 COM포트 송수신 기능이 부분적으로 불량함. H/W의 고장여부 점검 필요. |
(8) 시험 후에는 티치펜던트 시리얼포트 화면의 “에코” 설정을 다시 <무효>로 복원하십시오