4.2.2. 제어기 측 루프백 시험 방법
4.2.2. 제어기 측 루프백 시험 방법
(1) 로봇제어기의 티치펜던트에서 『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『3: 시리얼 포트』 → 『1: 시리얼 포트 #1』(혹은, 『2: 시리얼 포트 #2』) 화면으로 진입하여, 『[F1]: 통신시험』을 누릅니다.
(2) 화면의 지시에 따라, [그림 4.12] A처럼 제어기 캐비넷의 RS-232C 단자의 2-3번 핀을 단락 시킵니다. (외부 케이블까지 점검하려면 B와 같이 단락 시키십시오.)
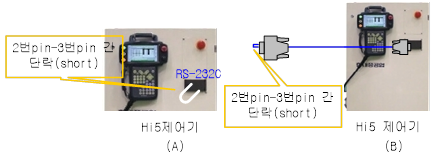
그림 4.12 제어기 캐비넷측 RS-232C 송수신 단락
(3) [ENTER] 키를 눌렀을 때 [그림4.13]와 같은 메시지가 나오면 정상입니다.
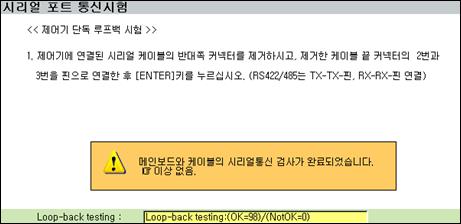
그림 4.13 루프백 시험결과 정상
(4) 오류인 경우에는 [그림 4.14]과 같이 2번 단계로 넘어간다는 메시지가 나옵니다. 화면의 지시에 따라 메인보드 RS-232C 단자의 2-3번 핀을 단락 시킵니다.
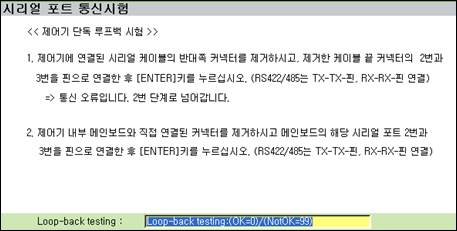
그림 4.14 메인보드 측 RS-232C 송수신 단락

그림 4.15 메인보드 측 RS-232C 송수신 단락
(5) [ENTER]키를 눌렀을 때 아래와 같은 메시지가 나오면 메인보드에는 이상이 없는 것이므로, 제어기 캐비닛 안쪽으로 RS-232C 단자에서 메인보드로 연결되는 반내 케이블 결선을 점검하십시오.
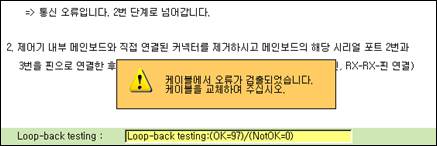
그림 4.16 반내 RS-232C 케이블 점검 메시지
(6) [ENTER]키를 눌렀을 때 아래와 같은 메시지가 나오면 메인보드에 이상이 있는 것이므로, 메인보드를 교체해 보십시오.
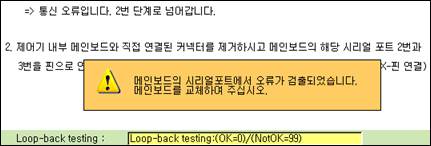
그림 4.17 메인보드 RS-232C 이상 메시지