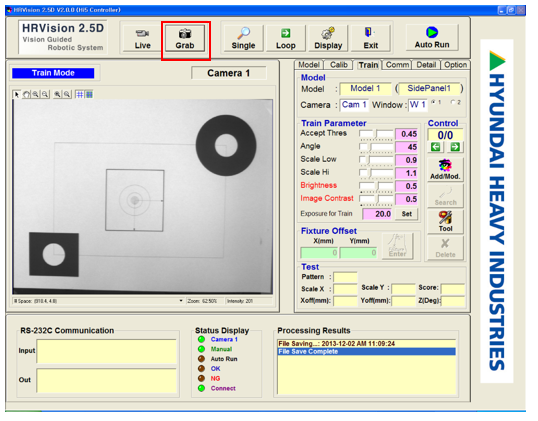
Hi5 제어기기능HR Vision 2.5D4. 작업 절차4.6. 모델 패턴 등록 및 패턴 인식 테스트4.6.1. 영상획득On this page4.6.1. 영상획득4.6.1. 영상획득 현대 로봇을 영상에서 보이지 않는 위치로 이동합니다. 이때, 작업물은 움직이면 안됩니다. 설정모드에서 “Train” 탭을 클릭하고, 조작버튼의 “Grab” 버튼을 클릭합니다.