4.6.3. Fixture Offset 설정
4.6.3. Fixture Offset 설정
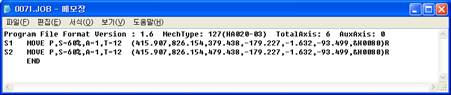
등록할 패턴의 원점과 로봇 툴이 실제 작업할 파지점까지의 상대거리를 설정합니다. 4.5의 “작업물 파지 위치 교시점”과 “Pattern 1의 원점”과의 실제 거리 차이를 입력하여 “Enter” 버튼을 클릭합니다.
“Pattern 1의 원점”위치를 알아내는 방법은 두 가지가 있습니다. 첫번째 방법은 로봇 교시로 “Pattern 1”의 원점을 교시하여 로봇 좌표계 기준의 위치를 기록하는 방법입니다.
두번째 방법은 만약 카메라 캘리브레이션이 수행되어 있으면, 3.7.2와 같이“Calib” 탭의 “Test” 기능을 이용하면 마우스 커서 위치에 해당하는 로봇좌표계 기준의 위치를 알수 있습니다.
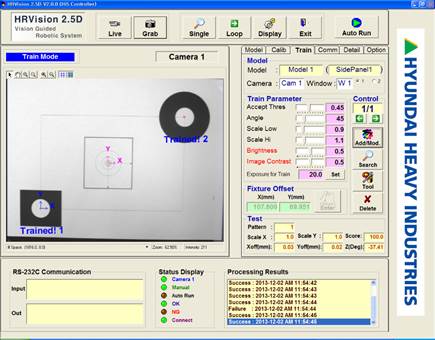
패턴 검색창을 설정 한 후, “Training” 버튼을 클릭합니다. 패턴 인식을 성공하면 다음과 같은 패턴 등록 대화상자가 발생합니다. 만약 패턴 인식 에러가 발생하였다면, 패턴 및 변수를 다시 설정 하십시오. 변수 설정은3.7.3 “Train” 탭을 참조하십시오.
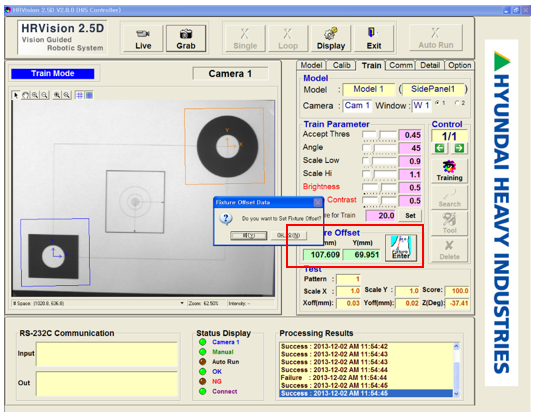
이때 4.6.2에서 설정한 패턴의 원점은 파란색 좌표축으로 표시되며, Fixture Offset으로 설정한 원점은 자주색으로 표시됩니다.