4.6.6. Depth Caliper 기능 설정
4.6.6. Depth Caliper 기능 설정
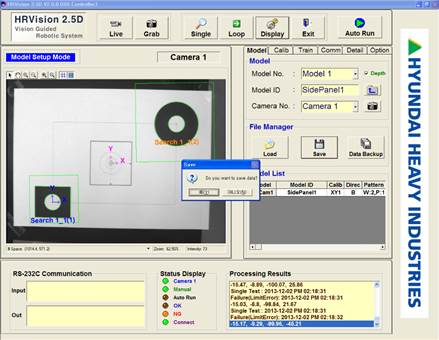
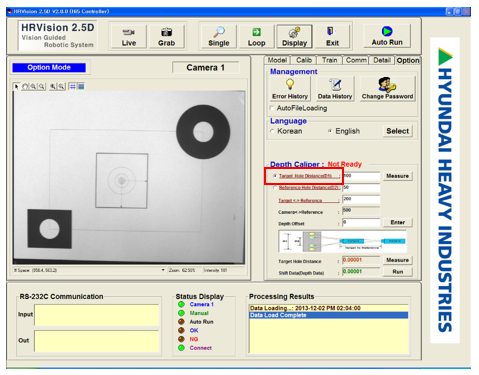
“Option” 탭을 클릭합니다. 로봇을 영상획득을 위한 위치에 배치한 후, 조작버튼의 “Grab”버튼을 클릭하여 영상을 획득합니다.
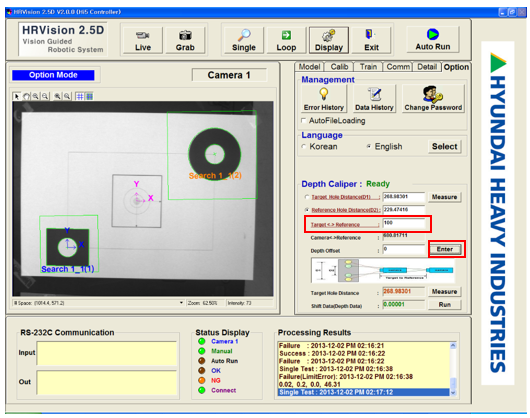
Depth Caliper의 “Target Hole Distance(D1) 라디오 버튼을 클릭합니다.
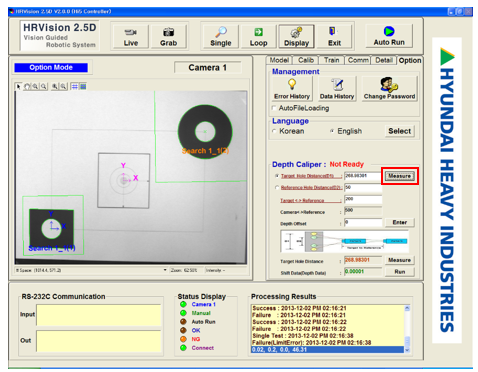
“Measure”버튼을 클릭하면 아래 그림과 같이 패턴 인식과정을 거친 후, 인식된 두 패턴 원점의 픽셀거리를 계산합니다.
그 다음, 로봇과 작업물간의 거리가 일정량만큼 증가하게 로봇을 이동합니다. 본 예제에서는 거리방향으로 +100mm만큼 이동했습니다.
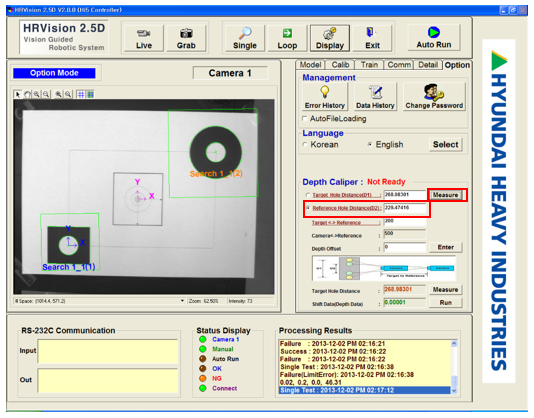
Depth Caliper의 “Reference Hole Distance(D2) 라디오 버튼을 클릭합니다.
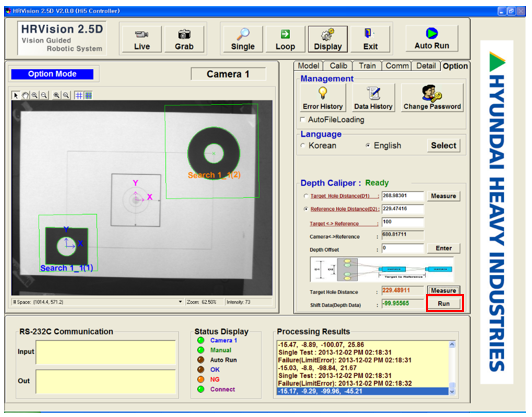
“Measure”버튼을 클릭하면 패턴 인식과정을 거친 후, 인식된 두 패턴 원점의 픽셀거리를 계산합니다.
로봇이 실제 이동한 거리(100mm)를 “Target<->Reference” 항목에 입력한 후 “Enter”버튼을 클릭합니다.
“Run” 버튼을 클릭 하여 “Shift Data(Depth Data)가 로봇이 실제 이동한 역부호 거리(100mm) 만큼 측정되는지 확인합니다.
Detail 탭의 “Shift Data Limit” 를 공정에 맞게 입력한 후 “Shift Limit Set” 버튼을 클릭합니다.
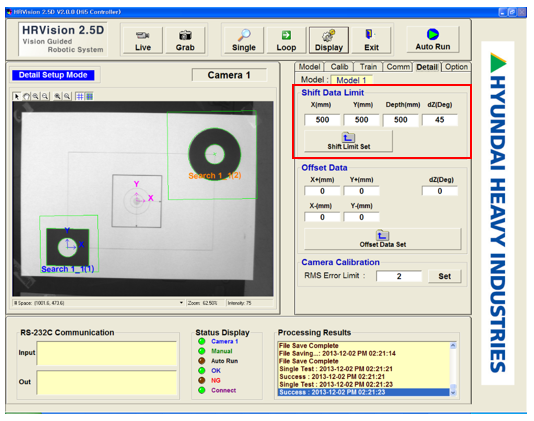
Model 탭의 “Save” 버튼을 클릭 하여 설정을 저장합니다.