1.2. Hi5OLP Package 구성
1.2. Hi5OLP Package 구성
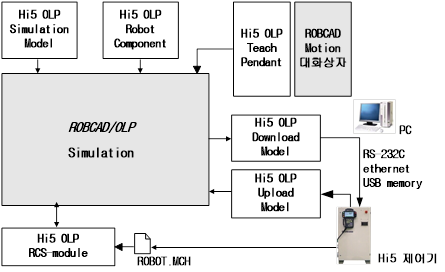
그림 1.2 Hi5 OLP Package의 구성
Hi5 OLP Package는 [그림1.2]와 같은 여러 가지 구성요소로 이루어져 있습니다. 각 구성요소의 역할은 [표 1-2]와 같습니다.
표 1‑2 Hi5 OLP Package의 구성요소
구성요소 | 역할 |
Teach Pendant | 각 로케이션에 대한 스텝 파라미터, 펑션 명령문의 입력과 편집 |
Simulation Model | 로봇 작업을 시뮬레이션 할 때에 Hi5제어기의 스텝, 펑션 해석 및 수행과 동일한 방식으로 로봇동작을 시뮬레이션 |
Download Model | 시뮬레이션과 수정, 확인을 거친 로봇 작업을 Hi5제어기용 작업프로그램 형식으로 변환 |
Upload Model | Hi5제어기에 존재하던 작업 프로그램을 ROBCAD의 작업 셀 내의 경로로 변환 |
Robot Component | 로봇의 형상과 키네마틱스를 정의한 CAD 데이터. ROBCAD의 작업 셀 내에 불러 작업 생성 및 시뮬레이션에 사용 |
RCS-module | Hi5 제어기의 모션동작을 시뮬레이션 할 때 로봇궤적을 계산 |