2.1. 하드웨어 환경 설치
2.1. 하드웨어 환경 설치
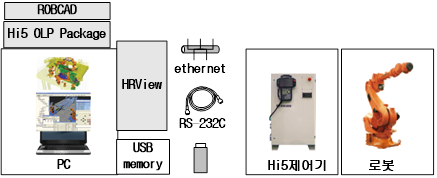
그림 2.1 Hi5 OLP Package사용의 하드웨어 구성
[그림 2.1]은 Hi5 OLP Package를 사용한 로봇 티칭에 사용되는 하드웨어 구성입니다.
ROBCAD가 설치된 데스크탑 PC나 노트북PC에서 시뮬레이션을 거쳐 생성해낸 작업프로그램을 Hi5제어기로 옮기게 됩니다. USB메모리나 RS-232C, 이더넷의 3가지 매체 중 하나를 이용하여 작업프로그램 파일을 Hi5제어기로 옮길 수 있습니다.