5.1. 포지셔너 독립조작 설정
5.1. 포지셔너 독립조작 설정
본 기능은 여러 대의 포지셔너를 이용하여 시스템을 구성할 때 사용하는 기능입니다. 한 대의 포지셔너에는 로봇과 작업을 수행하는 동안 다른 편에 있는 포지셔너는 외부 입력 신호에 의해 조그 동작을 수행할 수 있도록 지원합니다. 따라서 외부 입력 신호 번호 등의 설정이 필요합니다.
(1) 『[F2]: 시스템』 → 『4: 응용파라미터』 → 『6: 포지셔너 독립조작』을 선택합니다.
(2) 각 포지셔너(Station)에 대해 해당하는 설정을 합니다.
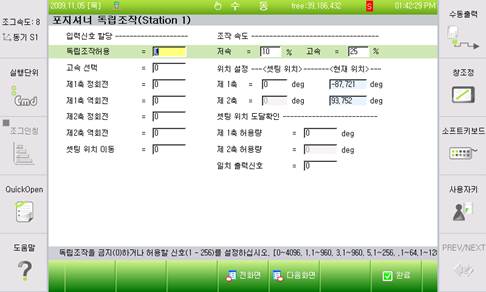
(3) 신호 설정의 의미는 아래의 표와 같습니다.
입출력신호 | 내용 | 비고 |
독립조작허용 | 독립조작을 금지(0)/허용(1) | 허용입력 후 독립 조작 가능 |
고속 선택 | 속도레벨 선택(0=저속, 1=고속) | 조작속도에 설정된 레벨로 속도 선택 조작속도 선택: 축 최고속의 %로 설정 |
제1축 정회전 | 포지셔너의 1축을 정방향(+) 회전 | 1, 2축 동시 조작 가능 |
제1축 역회전 | 포지셔너의 1축을 역방향(-) 회전 | 1, 2축 동시 조작 가능 |
제2축 정회전 | 포지셔너의 2축을 정방향(+) 회전 | 1, 2축 동시 조작 가능 |
제2축 역회전 | 포지셔너의 2축을 역방향(-) 회전 | 1, 2축 동시 조작 가능 |
셋팅위치이동 | 셋팅위치를 목표점으로 이동 | 1, 2축 전부 목표점으로 이동 축 조작 신호와 같이 사용할 수 없음 |
일치출력신호 | 셋팅위치 범위 내에 1,2축 모두 도달한 경우 셋팅위치 도달 확인 신호 출력 | 할당 신호 출력[DO# 신호] |
◆【주의사항】◆
① 입출력 신호에 할당된 신호를 중복하여 할당할 수 없습니다.
② 포지셔너 그룹을 먼저 설정하여야 포지셔너 독립조작 기능을 사용할 수 있습니다.
③ 부가축 MOVE독립실행 기능과(AXISCTRL) 포지셔너 독립조작 기능(SELSTN) 기능을 동시에 사용할 경우는 제어기가 비정상적인 에러가 발생할 수 있으므로 절대 혼용하지 마시기 바랍니다.