4.2. 서보핸드 가압/개방
4.2. 서보핸드 가압/개방
작업물 핸들링을 위한 서보핸드축의 가압 및 개방동작은 아래의 그림과 같이 동작합니다.
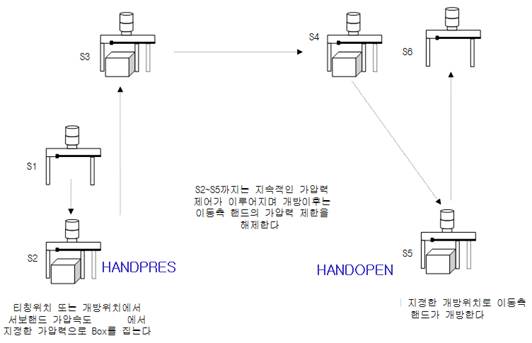
그림 4.1 작업물 핸들링을 위한 서보핸드 가압/개방 동작
(1) HANDPRES기능이 기록되어 있는 스텝을 이동하는 경우, 이전 스텝의 위치에서, 로봇은 기록한 위치로 이동합니다. 서보핸드의 이동축은 기록된 위치에 HANDPRES기능의 가압옵셋거리를 합한 위치로 이동합니다. 이때, 로봇축과 서보핸드축 모두 목표위치에 동시에 도달 합니다.
(2) 설정한 가압력으로 가압을 시작합니다. 이때에는 서보핸드 가압속도로 이동합니다.
(3) 가압력 일치가 되면, 작업물을 집고 작업물을 적재할 스텝까지 이동합니다.
(4) HANDOPEN기능이 기록되어 있는 스텝으로 이동한 후 지정된 개방위치까지 개방합니다. 이때의 서보핸드축의 속도는 최고속입니다.
(5) 개방 완료한 후 다음 스텝으로 이동합니다.

l 수동모드에서 스텝 전/후진으로 운전하는 경우, 조건설정의 스텝전/후진시 Function실행 선택 상태에 관계없이 항상 실행합니다.
l 서보핸드축 가압/개방위치가 소프트리밋 위치를 벗어나지 않도록 하여야 합니다.
l 서보핸드축 가압력이 너무 작을 경우에는 원하는 작업을 수행하지 못할 수도 있습니다.
l HANDPRES기능이 있는 스텝의 어큐러시 레벨은 작업물과 가압시작 위치 거리를 고려하여 조정하십시오.