4.5. 프레스 동기의 티칭
4.5. 프레스 동기의 티칭
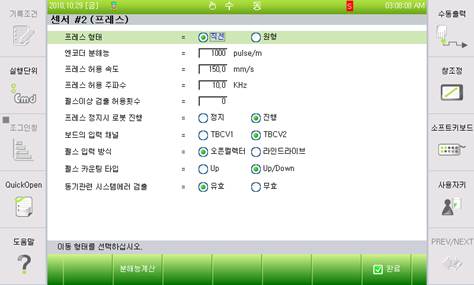
프레스 동기는 프레스의 속도에 로봇이 동기를 수행합니다. 프레스의 속도는 항상 일정하다고 가정하며 프레스의 속도가 가변될 경우 동기의 성능이 저하됩니다. 현재 운전하고 있는 프레스의 속도는 상기 메뉴에서 프레스 허용속도로 설정합니다.
다음은 프레스 동기를 사용하는 프로그램의 예입니다.
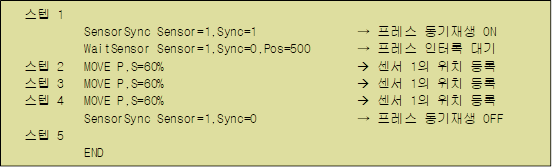

상기 프로그램에서 스텝 2,3,4 에서 센서의 위치는 반드시 증가하도록 교시되어야 하며 그렇지 못할 경우에는 다음과 같은 에러가 발생합니다.
E0239 스텝의 센서 위치가 순차적으로 증가하지 않습니다.
또한 스텝 2,3,4에 기록된 속도는 무시되며 기본적으로 사용자가 지정한 프레스의 허용속도를 기반으로 속도를 계획합니다. 만일 최고속으로 계획하여도 로봇의 성능을 초과하도록 센서와 로봇의 위치를 기록하면 동작 중에 다음과 같은 에러가 발생합니다.
E0238 센서 속도를 추종할 수 없습니다.