2.1.6. 프로그램작성예제
2.1.6. 프로그램작성예제
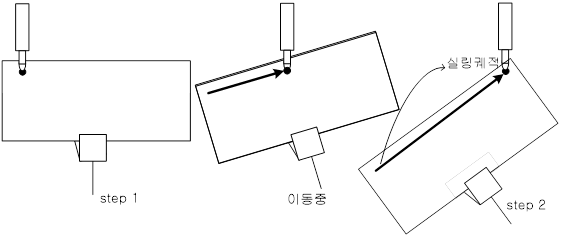
l 직선 보간 (MOVE SL)
작업물은 로봇이 핸들링하고 있고 외부에 정치 실링 툴이 사용되는 경우에, 사용자는 로봇을 움직여 작업물의 위치를 실링 툴에 맞추어 교시합니다. 만일 아래의 그림 a)와 같이 S1에서 S2에 실링을 직선으로 하고자 할 때. 스텝 1을 그림 b)와 같이 기록하고 정치툴 보간으로 이동하고자 하는 스텝2는 그림 c)와 같이 로봇의 위치와 자세를 이동하여 교시할 수 있습니다.

a) 요구되는 실링 궤적


b) 스텝 1의 교시 위치 c) 스텝 2의 교시 위치
이와 같이 교시된 프로그램은 아래 그림과 같이 정치툴이 작업물에 대해 직선을 그리며 이동하도록 로봇이 동작합니다.
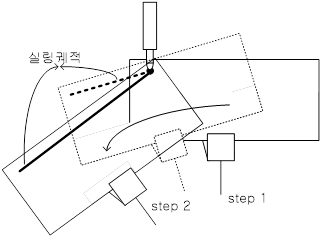
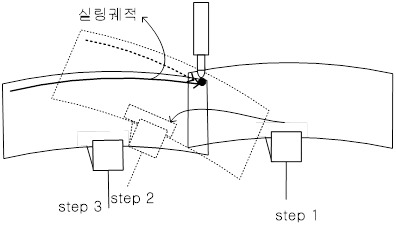
l 원호 보간 (MOVE SC)
정치툴 보간 기능은 원호보간도 지원합니다. 아래 그림과 같이 원호궤적을 그리고자 하는 스텝을 원호보간으로 기록합니다.

상기 그림과 같이 스텝1을 교시하고 스텝 2를 정치툴 원호 보간으로 교시합니다. 그리고, 위 그림의 스텝3이 원호 보간의 적절한 참조스텝이 되도록 교시합니다. 정치툴 원호 보간으로 교시된 스텝은 아래와 같이 고정된 정치툴에 대해 작업물이 원호 궤적을 생성하도록 로봇이 움직입니다.