4.6. 기준점 등록
4.6. 기준점 등록
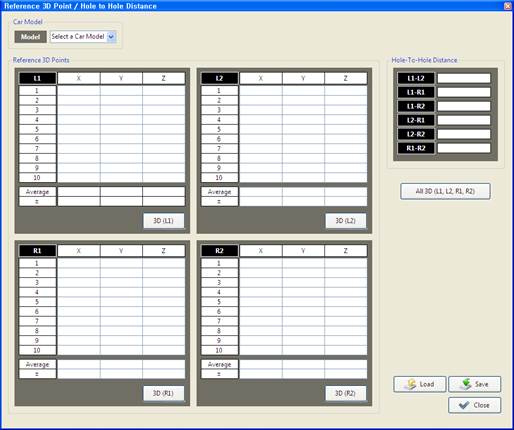
각 스테레오 카메라 별로 3차원 위치 측정이 모두 완료되었다면, 측정된 점들을 기준점으로 등록합니다. 조작버튼의 “Settings → Reference Point” 메뉴를 클릭합니다.“Car Model” 패널에서 차종을 선택하고, 각 로봇에 대응하는 카메라의 3D 버튼을 누릅니다. 예를 들어, 로봇 L1에 대응하는 카메라에서 측정한 3차원 위치를 얻으려면 “3D (L1)”버튼을 누릅니다. 버튼을 누를 때마다 측정한 3차원의 평균 위치와 정밀도가 계산됩니다. 기준 차체 위치의 정확도를 높이려면 10번 측정을 권장합니다. 정밀도는 다양한 요인에 의해 영향을 받으므로, ±값이 크면 외부 조명, 카메라 조리개, 케이블, 등록된 패턴 등을 다시 한번 점검해 보시기 바랍니다. 상기의 과정을 각 L2, R1, R2로봇에 반복하여 수행합니다. “Save”버튼을 누르면 기준 차체로 저장됩니다.