10.4.3.5. SEA
10.4.3.5. SEA
서-치 기능은 작업물의 위치가 달라진 차이를 검출하고 그 차이만큼 보정하는 기능입니다. 로봇 좌표계뿐만 아니라 툴 좌표계나 베이스좌표계 기준으로도 위치의 차를 검출하여 보정이 가능합니다.
설명 | 서-치 기능 | ||
문법 | SEA ST=<On/Off>,CRD=<기준좌표계>[,<사용자좌표계번호>],R=<레지스터 번호> | ||
파라미터 | On/Off | 1이면 On, 0이면 Off | 0~1 |
기준좌표계 | 0=베이스, 1=로봇, 2=툴, 3=사용자, 4=사용자n | 0~4 | |
사용자좌표계 번호 | 기준좌표계가 사용자일 때 사용자좌표계 번호 | 0,1~10 | |
레지스터번호 | 온라인 쉬프트에 사용할 레지스터의 번호 | 1~8 | |
사용 예 | SEA ST=1,RF=0,R=1 | ||
(1) 서치 범위를 지정합니다. (『[F7]: 조건설정』 메뉴에서 『[F1]: 응용조건』 → 『2: 로봇 서치 범위』)
(2) 프로그램을 티칭하고, 티칭에 필요한 서-치 기능을 기록합니다.
① 서-치 시작
② 로봇 인터럽트(RINT 또는 RINTA)
③ 서-치 종료
④ 온라인 쉬프트
(3) 서-치 기준위치 데이터 기록을 ON합니다. (『[F7]: 조건설정』 메뉴에서 『[F1]: 응용조건』 → 『1: 로봇 서치 기준위치 기록』)
(4) 1Cycle Mode에서 재생하여 로봇 인터럽트에 의해 작업물의 기준위치를 읽어 들입니다.
(5) 서-치 기준위치 데이터 기록을 Off합니다. (『[F7]: 조건설정』 메뉴에서 『[F1]: 응용조건』 → 『1: 로봇 서치 기준위치 기록』)
(6) 통상재생을 합니다.

11) 서-치 기능의 응용
① 1차원 서-치
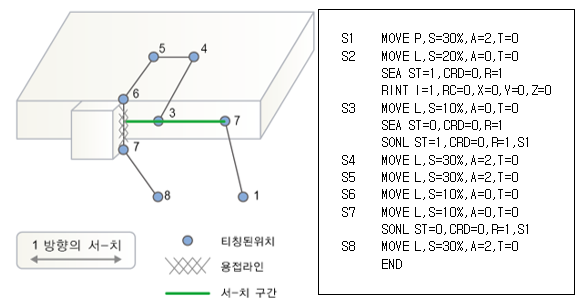
그림 10.5 1차원 서-치
위의 그림은 동일 작업물이 이동하거나 또는 형태가 같고 크기가 다른 경우에 1방향 서-치로 오차를 보정하는 것입니다.
서-치 기능은 위의 그림과 같이 로봇 인터럽트와 함께 사용됩니다. 쉬프트량은 쉬프트 레지스터에 기록한 후 온라인 쉬프트 기능을 사용하여 그 차이를 보정합니다.
그림에서 스텝 3의 위치로 가면서 로봇 인터럽트가 동작하여 쉬프트량을 쉬프트 레지스터에 기록합니다. 이 쉬프트 레지스터를 참조하여 스텝 4 - 스텝 7을 쉬프트하여 재생합니다. 또한, 로봇 인터럽트 기능은 직선보간과 원호보간으로 기록된 스텝에서만 함께 사용할 수 있습니다.
② 2차원 서-치
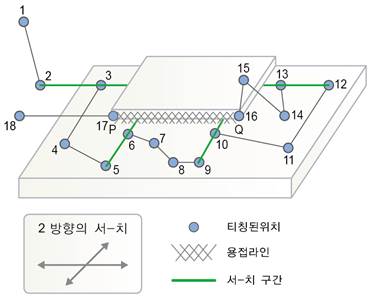
그림 10.6 2차원 서-치
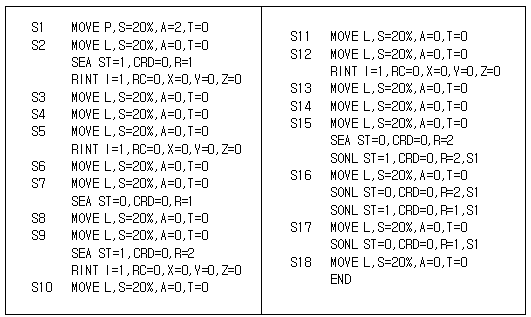
2방향의 서-치는 서-치 기능을 두 번 사용하여 각각의 점(P,Q)의 쉬프트량을 기록합니다. 이때, P점의 쉬프트량은 R1레지스터에 저장되고 P점 이동시에 참조됩니다. Q점의 쉬프트량은 R2레지스터에 저장되고 Q점 이동시에 참조됩니다.