10.4.3.9. TONL
10.4.3.9. TONL
그림10.7과 같이 3개의 기준스텝들의 새로운 위치를 시각장치 등의 외부 검출장치 (RS232C포트)로 측정하여 각각의 쉬프트값을 로봇제어기로 송신하면, 로봇제어기는 기준 3점과 틀어진 3점을 이용하여 좌표변환을 위한 절대위치 값, 혹은 쉬프트값을 계산하여, TONL 시작과 종료 사이의 스텝들에 대해 위치보정을 수행하여 재생하는 기능입니다.
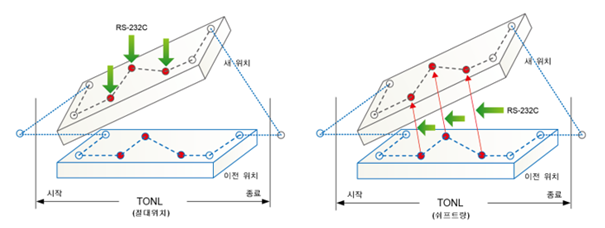
그림 10.7 온라인 좌표변환
설명 | 온라인 좌표변환(쉬프트량) | ||
문법 | TONL SFT=<수신형태>,ST=<시작/종료>,<기준스텝1>,<기준스텝2>,<기준스텝3> | ||
파라미터 | 수신형태 | 데이터 수신형태. 0=절대좌표, 1=쉬프트량 | 0~1 |
시작/종료 | 1이면 좌표변환 시작, 0이면 종료. | 0~1 | |
기준스텝 | 기준 3점으로 지정할 스텝 | 0~999 | |
사용 예 | TONL SFT=0,ST=1,S1,S5,S7 | ||
비고 | 이 기능을 수행하기 위해서는 TONL 명령문 이전에 SREQ 명령문이 반드시 필요합니다. 이 기능은 3개의 기준 스텝들의 새로운 위치를 3개의 절대위치, 혹은 쉬프트량으로 수신하여 쉬프트 값을 계산합니다. | ||