4.3.2.1. 개요
4.3.2.1. 개요
로봇의 동작에 대한 연산과 제어를 하며 다양한 통신 인터페이스 기능을 내장하고 있습니다. 시리얼, 이더넷, CAN 등 다양한 통신 포트를 통한 주변 기기와 접속은 다양한MMI(Man-Machine Interface) 환경구축을 가능하게 합니다. 제어기 정수, 에러이력, 조작이력, 티칭 프로그램 등과 같은 정보파일들은 티치펜던트를 통하여 관리합니다.
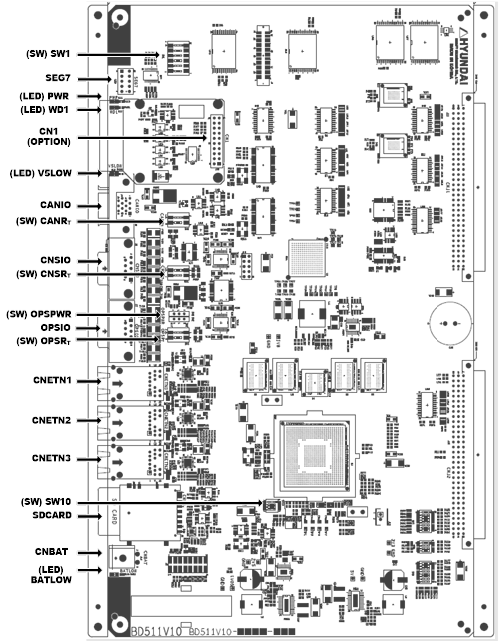
그림 4.17 메인보드(BD511)
로봇의 동작에 대한 연산과 제어를 하며 다양한 통신 인터페이스 기능을 내장하고 있습니다. 시리얼, 이더넷, CAN 등 다양한 통신 포트를 통한 주변 기기와 접속은 다양한MMI(Man-Machine Interface) 환경구축을 가능하게 합니다. 제어기 정수, 에러이력, 조작이력, 티칭 프로그램 등과 같은 정보파일들은 티치펜던트를 통하여 관리합니다.
그림 4.17 메인보드(BD511)