3.2.2. 로봇-카메라 캘리브레이션 기능
3.2.2. 로봇-카메라 캘리브레이션 기능
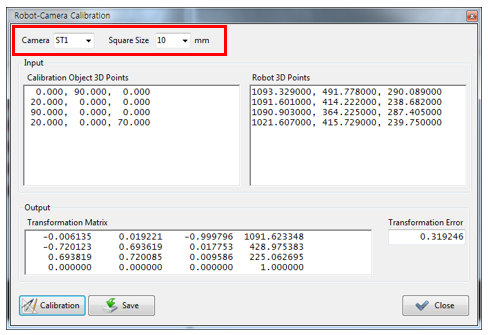
보정판 좌표계와 로봇 좌표계를 일치시키는 과정입니다.
카메라 콤보박스에서 ST1을 선택하고, 보정판 사각형의 크기를 선택하면, “Calibration Object 3D Points”가 자동으로 생성됩니다. 여기에 상응하는 로봇 교시점 4개를 입력한 후 “Calibration” 버튼을 클릭하면 보정판 좌표계와 카메라의 관계를 변환행렬로 표시하며, 이때 발생한 변환 오차를 “Transformation Error” 항목에 표시해 줍니다. 만약 오차가 1을 넘는다면, 로봇 교시점을 다시 확인해 주시고, 필요 시 재 교시하십시오.
“Save” 버튼을 클릭하면, 변환행렬 정보가 “C:*HRVision 3D-Stereo*Data*RobCalTransform”
폴더에 저장됩니다.
