3.2.3. 핸드아이 캘리브레이션 기능
3.2.3. 핸드아이 캘리브레이션 기능
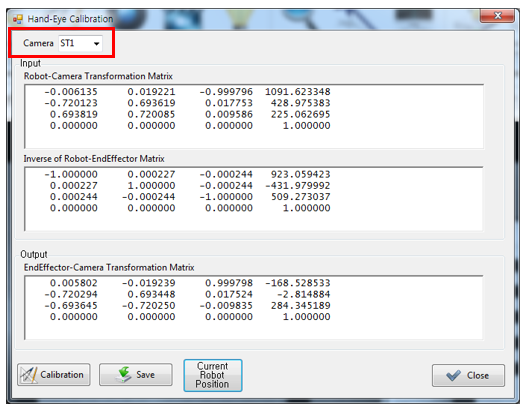
로봇과 카메라의 관계를 구하는 과정입니다.
카메라 콤보박스에서 ST1을 선택하면, 이전 단계에서 획득한 Robot-Camera Transform Matrix를 로드하여 보여줍니다.보정판을 획득할 때의 로봇 위치를 로봇과의 통신을 통해 미리 입력 받아 둡니다.
다이얼로그 박스의 “Current Robot Position”버튼을 클릭하면 입력된 로봇 위치에 대한 데이터를“Inverse of Robot-EndEffector Matrix”에 표시합니다.
“Calibration” 버튼을 클릭하고, “Save” 버튼을 클릭하면 핸드아이 캘리브레이션이 완료됩니다.
핸드아이 캘리브레이션 정보는 “C:*HRVision 3D-Stereo*Data*RobCalTransform”폴더에 저장됩니다.