4.2. 터치센싱과 아크센싱을 이용한 필렛 용접
4.2. 터치센싱과 아크센싱을 이용한 필렛 용접
일반적으로 아크센싱 기능은 터치센싱 기능과 함께 사용합니다. 터치센싱 기능을 이용하면 정확한 용접 시작 위치 및 종료 위치를 찾을 수 있고 아크센싱 기능을 이용하면 용접 시작 후 이동하며 정확한 방향을 찾을 수 있습니다.
첫 번째 예시는 가장 기본적인 필렛 용접입니다.
작업 순서는 다음과 같습니다.
1) 위빙 조건, 아크센싱 조건, 용접 조건 설정
2) 터치 센싱을 이용하여 용접 시작 위치 탐색
3) 종료 위치 근처 이동 후 터치 센싱을 이용하여 용접 종료 위치 탐색
4) 용접 시작위치에서 위빙 명령어, 아크용접 명령어를 이용하여 작업 수행
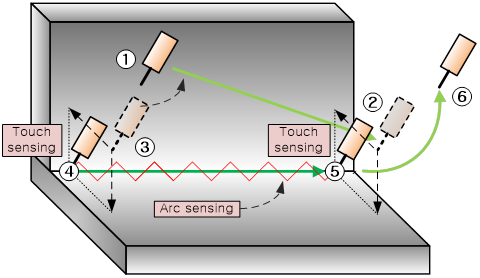
그림 4.1 필렛 터치센싱과 아크센싱
l 예시 프로그램은 다음과 같습니다.
~~~~~~~아크센싱 프로그램: 0001.JOB~~~~~~~~~~~~~~~
'아크센싱 프로그램
S1 MOVE P,S=60%,A=3,T=1 ' 1: 동작 시작점
S2 MOVE L,S=30%,A=3,T=1 ' 2: 종료점 터치센싱 위치
TOUCHSEN TSC#=1,-X,-Z,0,P10,V1! ' 3: 종료점 터치센싱. P10에 위치 저장
S3 MOVE L,S=30%,A=3,T=1 ' 4: 시작점 터치센싱 위치
TOUCHSEN TSC#=1,-X,-Z,0,P1,V1! ' 5: 시작점 터치센싱. P1에 위치 저장
S4 MOVE L,P1,S=20%,A=3,T=1 ' 6: 용접 시작 점으로 이동
WEAVON WEV#=1 ' 7: 위빙, 아크센싱 시작
ARCON ASF#=1 ' 8: 용접 시작
S5 MOVE L,P10,S=60cm/min,A=3,T=1 ' 9: 용접 종료 점으로 이동
ARCOF ASF# '10:용접 종료
WEAVOF '11:위빙, 아크센싱 종료
S6 MOVE P,S=60%,A=3,T=1 '12: 동작 종료점
END
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~