2.1.4.2. 로봇 2
2.1.4.2. 로봇 2
1) 로봇 2이 공통 큐브 영역(큐브1)으로 진입 직전
→ 로봇 1이 먼저 진입하여 작업 중이므로 자동 정지 대기 (“큐브진입 대기 중”)

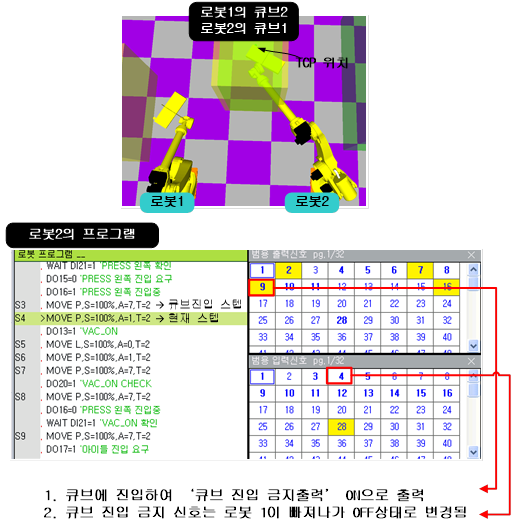
2) 로봇 2가 로봇 1이 빠져 나간 공통 큐브 영역(큐브1)으로 진입
→ 로봇 2의 큐브진입 출력신호 ON
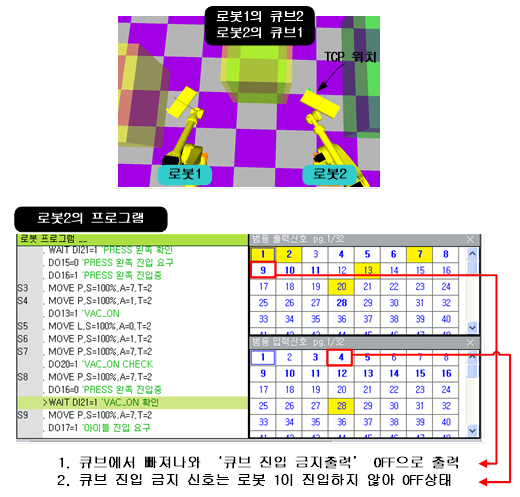
3) 로봇 2가 작업영역에서 빠져나감
→ 로봇 2의 큐브진입 출력신호 OFF로 클리어 됨.
1) 로봇 2이 공통 큐브 영역(큐브1)으로 진입 직전
→ 로봇 1이 먼저 진입하여 작업 중이므로 자동 정지 대기 (“큐브진입 대기 중”)
2) 로봇 2가 로봇 1이 빠져 나간 공통 큐브 영역(큐브1)으로 진입
→ 로봇 2의 큐브진입 출력신호 ON
3) 로봇 2가 작업영역에서 빠져나감
→ 로봇 2의 큐브진입 출력신호 OFF로 클리어 됨.