3.5. CMOV 기록모드 조그
3.5. CMOV 기록모드 조그
CMOV기록 모드는 지그리스 협조 동작을 위해 슬레이브의 위치를 교시하는 모드입니다.
n CMOV 기록모드 설정 방법
① 로봇역할을 슬레이브로 선택합니다.
② 마스터 로봇의 수동 협조 상태를 MASTER로 놓습니다.
③ 직교좌표계 조그 상태에서 조작하면 아래의 그림과 같이 마스터의 툴 엔드 이펙터 좌표계 기준으로 직교 좌표 조그가 이루어집니다. (V40.13-00 이하 버전)
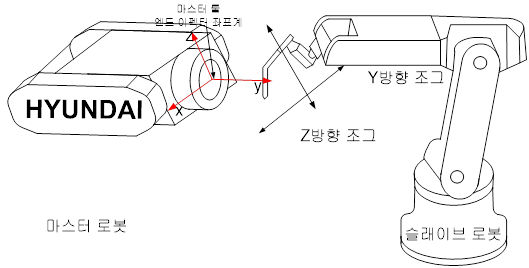
그림 3.10 CMOV 기록모드 조그
④ 직교좌표계 조그 상태에서도 마스터 좌표와 상관없이 로봇의 직교좌표계 기준으로 조그가 이루어집니다. (V40.13-03 이후)

l 협조제어 시스템의 주행축은 마스터와 슬레이브가 가능한 평행하게 설치되어야 합니다.
l 슬레이브가 CMOV기록 모드일 때는 수동 협조 상태가 마스터로 설정된 로봇의 조그 조작은 불가합니다.
l 버전에 따라 CMOV 기록모드의 조그 좌표계가 달라지므로 주의가 필요합니다.