2.1. 내장 PLC의 모드 설정
2.1. 내장 PLC의 모드 설정
내장 PLC의 동작모드는 『[F7]: 조건설정』 → 『[F1]: 응용조건』 → 『5: 내장 PLC 모드』에서<Off, Stop, R-Stop, R-Run, Run>중 하나를 선택할 수 있습니다.
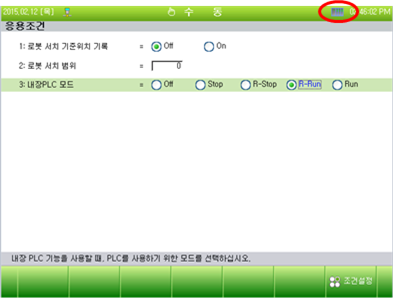
그림2.1 내장 PLC모드 설정
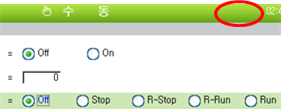
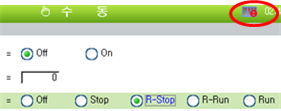
선택된 모드에 따라 TP화면 우측상단에 아이콘으로 상태를 표시합니다. 즉, PLC=<R-Run이나 Run>상태이면 상기 그림과 같이 PLC그림이 표시되고, PLC=Off인 경우에는 하기 그림과 같이 아이콘이 사라지며, PLC=STOP상태이면 PLC그림에 적색금지마크가 표시됩니다.
그림 2.2 내장 PLC Off 상태 |
그림 2.3 내장 PLC STOP상태 |
n Off
내장 PLC의 기능이 무효로 됩니다. 이 경우, 로봇제어기의 디지털 출력(Digital Output)인 DO1~DO4096이 물리적 출력(Physical Output)인 Y1~Y4096으로 자동 출력되고, 물리적 입력인 X1~X4096이DI1~DI4096으로 자동 입력됩니다. 이 경우에도DI, DO, X, 그리고 Y에 대한 속성이 각각 적용됩니다. 예를 들어 DO1이 부논리이고, Y1도 부논리인 경우, DO1=1로 출력하면 DO1이 부논리라서 0가 Y1로 입력되고 Y1의 속성도 부논리이므로 실제 출력되는 값은 Y1=1이 됩니다.
n R-Stop / Stop
내장 PLC의 동작을 정지시킵니다. R-Stop은 HRLadder에서 변경할 수 있는 리모트(Remote)상태를 나타내며, STOP으로 설정하면 HRLadder에서 동작모드를 변경할 수 없습니다. 내장 PLC가 Stop될 때에는 PLC의 출력신호인 DI, Y, R 릴레이가 자동으로 0이 됩니다. 다만, PLC외의 HRBasic이나 할당에서도 Y출력에 값을 출력할 수 있는 조건인 SP11=On인 경우에는 Y출력은 이전 값을 유지합니다.
n R-Run / Run
내장 PLC를 실행시킵니다. R-Run은 HRLadder에서 변경할 수 있는 리모트(Remote)상태를 나타내며, Run으로 설정하면 HRLadder에서 동작모드를 변경할 수 없습니다.