10.1.2. 용접 수행 - 공압건
10.1.2. 용접 수행 - 공압건
공압건의 동작은 스크립트 파일에 의해 수행됩니다. 스크립트는 용접지령신호 Weld를 입력받아 이동전극의 가압 움직임을 보여준 후, Complete 명령을 출력합니다.
spot_airgun.vbs | C건용. 신호에 의한 공압건 제어 |
x_gun.vbs | X건용. 신호에 의한 공압건 제어 및 X건 링크동작 제어 |
이 스크립트는 아래와 같은 특성설정이 필요합니다.
| 이 름 | 의 미 |
Mx0 | Mx값이 0일 때의 이동전극 축 값 | |
Mx1 | Mx값이 1일 때의 이동전극 축 값 | |
Closed | 가압시의 이동전극 축 값 | |
UnitMove | 이동전극의 동작 단위 (값이 클수록 속도 빠름) |

아래 그림을 보면 SPOT 명령문이 수행될 때, 로봇은 W1 출력할당신호를 출력한 후 대기합니다.
(출력할당과 입력할당은 가상티치펜던트로 시스템/응용파라미터/스폿용접 메뉴에서 설정합니다.)
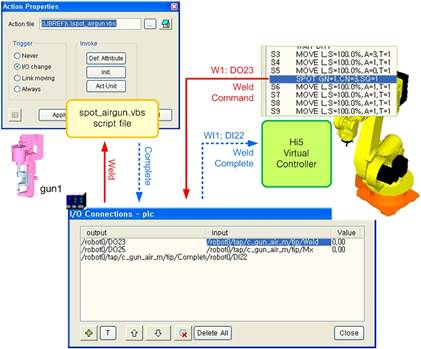
이 신호를 이동전극에 Weld 신호로 입력시켜야 하므로, 아래의 예와 같이 plc 모델에 I/O 연결을 설정하십시오.(작업공간 구성에 맞게 경로는 적절히 설정해주십시오.)
출력 | 입력 |
/robot0/DO23 | /robot0/tap/g_gun/tip/Weld |
이동전극의 스크립트인 spot_airgun.vbs는 Weld 신호가 입력되면 용접 동작을 수행한 후에 Complete 신호를 출력합니다. 이 신호를 로봇에 WI1 입력할당신호로 입력시켜야 하므로, 아래의 예와 같이 plc 모델에 I/O 연결을 설정하십시오.
출력 | 입력 |
/robot0/tap/g_gun/tip/Complete | /robot0/DI22 |
대기하고 있던 언어해석기는 WI1신호를 받으면 다음 명령문으로 진행합니다. 이러한 I/O 연결은 실제 공정에서의 공압건 동작방식과 같은 것입니다.